机构名称:
¥ 3.0
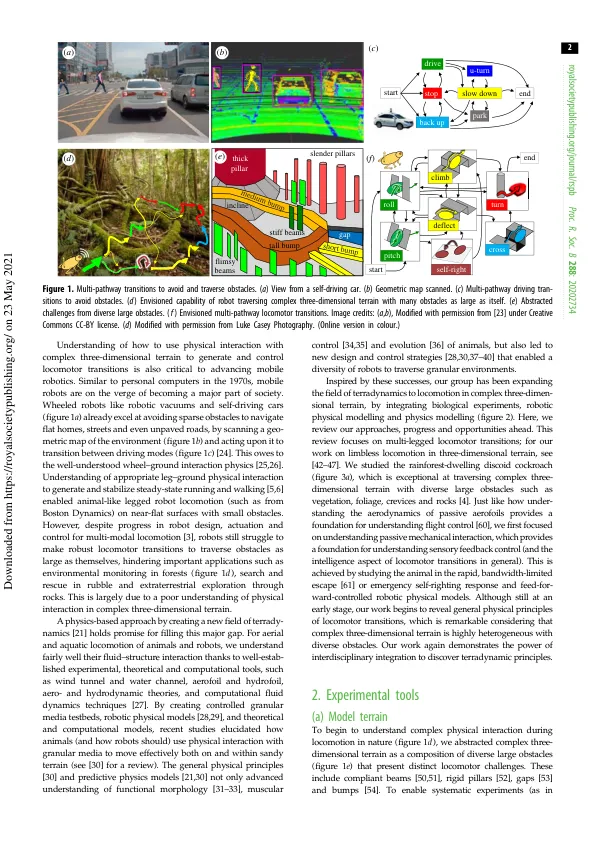
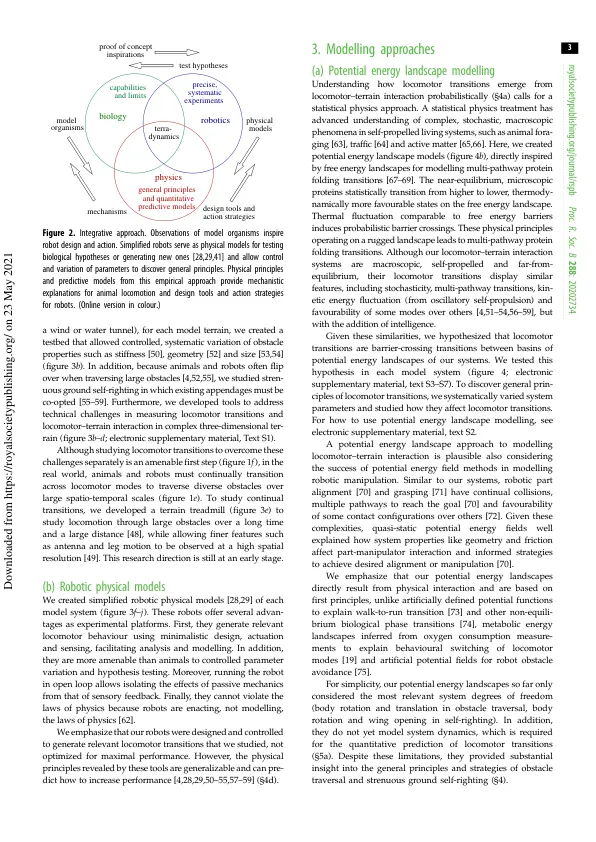
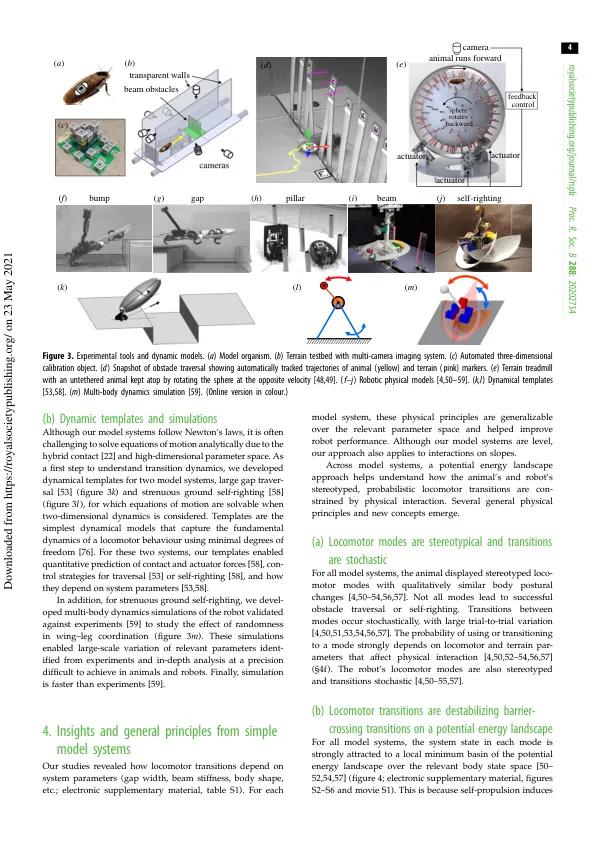
要遍历具有较大障碍的三维地形,必须跨不同模式过渡。但是,对陆地运动的大多数机械理解都涉及如何生成和稳定近态状态的单模运动(例如步行,跑步)。我们对如何使用物理互动来实现强大的运动转变了解一无所知。在这里,我们使用简化的模型系统来审查我们通过发现多腿运动过渡的巨大原理来填补这一空白的进展,这些模型系统代表了复杂的三维领域的独特挑战。非常明显的是,通过使用势能景观方法对运动型 - 地形相互作用进行建模,从不同的模型系统中出现了一般的物理原理。动物和机器人的刻板运动模式受到物理相互作用的约束。运动过渡是随机的,在景观上的稳定,障碍物的横断过渡。可以通过馈送前进的自我启动来诱导它们,并通过反馈控制的主动调整来促进。我们系统研究的一般物理原理和策略已经在简单模型系统中提高机器人性能。仍在更好地了解运动转变的智能方面以及如何从抽象的Challenges的简单景观中构成复杂三维地形的大规模势能景观。这将阐明神经力学控制系统如何介导物理相互作用以产生多条纹运动转变并导致生物学,物理,机器人和动态系统理论的进步。
势能环境中的运动过渡...
主要关键词


相关文件推荐