机构名称:
¥ 15.0
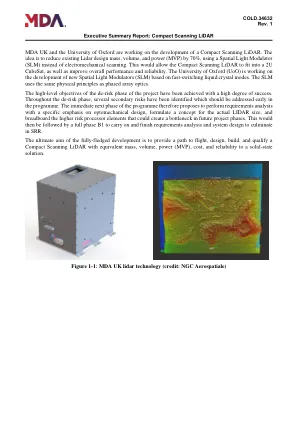
摘要:在过去的几年中,滥用民用无人机或无人机(无人驾驶飞机)一直是一个令人关注的问题。作为响应,已经开发了多个系统,包括光学,电子甚至声学技术,以进行检测和跟踪。不幸的是,由于其小小的,十分尺寸的大小以及形状和行为的巨大变化,无人机代表了一个具有挑战性的目标。在该博士学位上,我们开发了一种激光雷达(光检测和范围)系统,以解决此问题以拆除一公里处。在我们的系统中,范围是使用ight原理的时间来获取的,并通过使用双轴电量器依次扫描场景来完成图像。我们利用扫描多功能性开发了多种操作模式。标准检测模式使用大量视图的栅格扫描捕获场景的图像。跟踪模式基于围绕目标的本地模式,该模式以非常高的速率更新,以使目标保持在其边界内。e Ort被纳入了我们扫描激增的众多参数的理论和数值优化研究中,以便在最大范围,本地化分辨率和速率方面达到表现性能。用于检测和跟踪模式的模式优化是主要焦点,使用检测的目标概率作为最大化的函数。目标大小,速度和替代性也引入了检测的概率,从而完整概述了系统性能。该原型在几周的试验中测试了无人机检测和跟踪。在我们的LiDAR平台上,从头开始开发,每个组件的表征都可以丰富和验证我们的模型。成功之后,候选人启动和监督了工业前的整合过程。
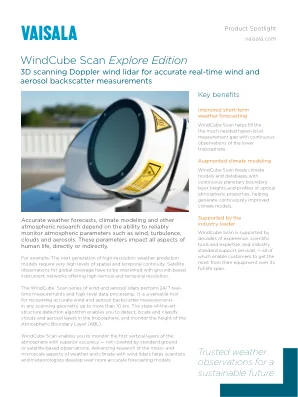
用于远距离检测和跟踪的扫描激光雷达......
主要关键词



相关文件推荐