XiaoMi-AI文件搜索系统
World File Search System力传感器

体感皮质的生物映射多通道微刺激传达了仿生手的高分辨率力反馈
手动相互作用与对象相互作用受到手的触觉信号的支持。这种触觉反馈可以通过体感皮质(S1)的心脏内微刺激(ICM)在脑控制的仿生手中恢复。在基于ICMS的触觉反馈中,可以通过基于仿生手上力传感器的输出调节刺激强度来发出接触力,这又调节了感知的感觉的幅度。在本研究中,我们在三名参与者中衡量了基于ICMS的力反馈的动态范围和精度,这些参与者植入了S1中的微电极阵列。为此,我们测量了由于ICM振幅增加以及参与者区分不同强度水平的能力而导致的感觉幅度的增加。然后,我们通过实施“仿生” ICMS培训来评估是否可以提高反馈的忠诚度,旨在唤起神经元活动的模式,这些模式更紧密地模仿那些自然接触的人,并一次通过多个通道传递ICMS。我们发现,多通道仿生ICMS产生的感觉比单通道对应物更强,更有区别。最后,我们用仿生手实施了仿生多通道反馈,并让参与者执行合规性歧视任务。我们发现,仿生多通道触觉反馈对单渠道线性对应物产生了改善的歧视。我们得出的结论是,多通道仿生的ICMS传达了精细分级的力反馈,该反馈更接近自然接触所赋予的灵敏度。
自动货物运输:全面审查...
喀拉拉邦,印度摘要:由于其潜力彻底改变了物流,建筑和医疗保健等行业的潜力,因此开发了商品运输楼梯机器人。这些机器人能够自主浏览楼梯和不均匀的地形,为在多层环境中的材料处理提供有效的解决方案,降低了人工的劳动并提高了运营生产力。关键设计类别包括轮式系统,它们更快但在楼梯和腿部机器人方面挣扎,这些机器人为楼梯导航提供了更好的适应性和稳定性。混合设计结合了车轮和腿部的混合设计,以及可以重新配置特定任务的模块化机器人,也正在探索以提高不同环境的性能。此外,传感器技术和人工智能(AI)是实现自主导航不可或缺的一部分。LIDAR,相机和力传感器之类的传感器可以帮助机器人检测地形的障碍物,楼梯和变化,而AI算法则处理此数据以实时导航。尽管取得了进展,但仍然存在稳定,能源效率和安全性等挑战。确保在楼梯上运输货物时保持平衡,优化延长操作时间的电力使用情况,并保持与人类和环境的安全互动是关键的障碍。未来的研究可能会集中在克服这些挑战上,尤其是通过稳定性,能源管理的进步以及更复杂的AI和传感器系统的整合,最终改善了机器人在多样化的多层环境中的性能。索引 - 攀爬机器人,混合设计,人工智能(AI),传感器技术,能源效率

橡胶cuplumps的表面韧性分析仪
摘要:菲律宾过去一直是橡胶生产最重要的国家之一,这是最重要的全球商品之一。不幸的是,菲律宾橡胶行业因不公平的贸易做法而陷入困境,导致橡胶质量差。优质橡胶使用甲酸进行乳胶凝结。偏好保证具有良好色彩的一致高质量橡胶产品,以及全球市场的需求。因此,甲酸是干橡胶生产中天然橡胶乳胶的最佳凝结剂之一。同时,当地制造商从电池中使用硫酸在橡胶制造商中引起了极大的关注。上述试剂的使用引起了警报,因为据报道过度使用硫酸会影响原始橡胶的耐用性。干橡胶中酸的任何残留物也可能有害,并可能影响治疗特性。这种低品质橡胶的生产几乎将世界橡胶行业的国家作为原材料来源。然而,菲律宾在检测并因此消除了硫酸化的橡胶以进行质量控制方面没有轻松的现场测试方案。我们在本文报告了新开发的现场测试传感器设备,该设备可以区分使用甲酸针对辛酸凝结的cuplumps。该开发的传感器通过刺穿橡胶样品并确定在橡胶样品表面上施加的力/压力来起作用。由于其由于所使用的凝结剂的不同而导致其结构差异,在穿过橡胶样品的刺穿过程中会观察到不同的力。发达的力传感器已成功进行现场测试,以进行立即进行质量评估,在初级处理和收获后,可以通过促进质量评估和保证来帮助提高菲律宾橡胶行业的竞争力。

3D 打印聚乳酸的压阻特性 (...
摘要:人们对 3D 打印在传感器制造中的应用越来越感兴趣。使用 3D 打印技术为制造几何和功能复杂的传感器提供了一种新方法。这项工作介绍了对 3D 打印热塑性纳米复合材料在施加力下的压缩的分析。获得了相应电阻变化与施加负载的响应,以评估打印层作为压力/力传感器的有效性。聚乳酸 (PLA) 基质中的多壁碳纳米管 (MWNT) 和高结构炭黑 (Ketjenblack) (KB) 被挤出以开发可 3D 打印的细丝。研究了创建的 3D 打印层的电和压阻行为。MWNT 和 KB 3D 打印层的渗透阈值分别为 1 wt.% 和 4 wt.%。厚度为 1 mm 的 PLA/1 wt.% MWNT 3D 打印层表现出负压系数 (NPC),其特征是,当压缩载荷增加至 18 N 且最大应变高达约 16% 时,电阻会下降约一个数量级。在力速率为 1 N/min 的循环模式下,PLA/1 wt.% MWNT 3D 打印层表现出良好的性能,压阻系数或应变系数 (G) 为 7.6,压阻响应幅度 (A r) 约为 -0.8。KB 复合材料在循环模式下无法显示稳定的压阻响应。然而,在高力率压缩下,PLA/4 wt.% KB 3D 打印层导致大灵敏度的响应(Ar=-0.90)并且在第一个循环中不受噪声影响,具有 G = 47.6 的高值,这是一种高效的压阻行为。
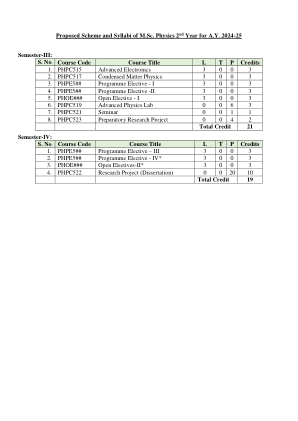
理学硕士物理学第二年拟议的方案和教学大纲...
高级电子学学分 3-0-0:3 课程教育目标: COE1 让学生熟悉先进的电子设备及其应用。 COE2 培养对数字电路设计和使用微控制器连接简单系统的理解。 COE3 培养对通信系统的理解。 UNIT-1 9 L 半导体器件:载流子的漂移和扩散、电荷的产生和复合、直接和间接半导体。PN 结、二极管方程、PN 结的势垒宽度和电容、变容二极管、开关二极管、作为开关和放大器的 FET、光电器件:LED、二极管激光器、光电探测器和太阳能电池。 UNIT-2 9 L 先进电子设备:金属氧化物场效应晶体管 (MOSFET)、MOSFET 中的短沟道效应、鳍式场效应晶体管 (FinFET)、铁电场效应器件和 2D 纳米片器件;新兴存储设备:DRAM、ReRAM、FeRAM 和相变存储器 (PCM) 以及通用存储设备。UNIT-3 10 L 模拟系统:锁相环及其应用频率倍增;模拟乘法器及其应用;对数和反对数放大器;仪表放大器;传感器:温度、磁场、位移、光强度和力传感器组合电路设计:编程逻辑器件和门阵列、7 段和 LCD 显示系统、数字增益控制、模拟多路复用器、基于 PC 的测量系统;序贯电路设计:不同类型的 A/D 和 D/A 转换技术、TTL、ECL、MOS 和 CMOS 操作和规格。 UNIT-4 9 L 通信系统:通信系统的概念、电磁频谱的作用、通信系统术语的基本概念、调制的必要性、幅度、频率、脉冲幅度、脉冲位置、脉冲编码调制、通信系统中的信息、编码、脉冲调制的类型、脉冲宽度调制 (PWM)、脉冲位置调制 (PPM)、脉冲编码调制 (PCM) 的原理;数字通信简介。参考书:

康复外骨骼:评论论文
6计算机学生摘要,我们已经看到了康复外骨骼的出现,在康复疗法方面发生了革命。这些可穿戴的机器人正在改变瘫痪的患者和中风幸存者的游戏,为康复提供了新的希望。我们的团队一直在探索外骨骼设计的迷人世界,我们很高兴分享我们的见解。从机械设计到人类机器人相互作用,这些设备正在推动康复评估和治疗中可能的边界。在这篇评论中,我们将带您穿越康复外骨骼技术的发展。我们将研究这些人工外骨骼背后的生物力学,以了解联合机制和自由度。我们还将探索尖端的传感器技术,例如力传感器和惯性测量单元,从而使精确的运动控制成为可能。另外,我们将检查个性化治疗的自适应控制算法,并分享来自临床试验的现实世界经验。最后,您将清楚地了解该领域的前进方向及其改变生活的潜力。关键字:康复外骨骼,辅助机器人技术,可穿戴外骨骼,神经居住技术,人类机器人互动(HRI)康复外骨骼技术的进化康复外骨骼的旅程是不可思议的。从他们谦虚的开端到尖端设备,我们今天看到,这些可穿戴的机器人彻底改变了康复疗法领域。这些早期设计的示例包括DGO,Lopes和Alex 1。早期设计用于康复目的的外骨骼的概念在1960年代开始成形。最初,这些设备笨重,固定,主要用于训练具有体重支撑的跑步机的患者。这些系统旨在减少康复期间下肢的负载,但其有限的移动性限制了它们用于临床环境。随着技术的高级,研究人员开始专注于开发便携式辅助外骨骼。到2000年代初,我们看到了Ekso,Rewalk,Indego和Exo H2 1等设备的出现。这些外骨骼旨在为脊髓损伤导致完全麻痹的个体提供最大的援助。但是,它们仍然相对较重,重11至25千克1。

定量打击乐诊断,用于评估冷喷涂和激光沉积材料的孔隙率和表面粗糙度
定量打击乐诊断(QPD)是最近使用PerientoMeter®仪器(Curmetrics LLC,Los Angeles,CA)形成的最近开发的非破坏性测试(NDT)方法。这种测试方式已用于检测和定量分析整体迁移率以及细节缺陷的存在,例如与牙齿[1]和牙科植入物相关的裂纹[2,3]。QPD的有效性也已被证明可以检测到层压板结构中的弱“亲吻”键[4,5]。QPD测试系统由一个探针组成,该探针包含一个被启用的力传感器,该探针被启用以敲击规格。在探针对试样的打击乐后,杆中的压电传感器记录了力时间数据。这种相对较低的撞击会在标本中产生最大应力,而这种应力是无损的。在标本的特征上,每种打击乐的实力时间验证是在杆与试样接触的0.2 E 0.4 ms上记录的。与打击乐探针相连的计算机中的软件确定了每次进行测量时测量的力与10个打击乐器的时间返回到杆的机械能[4 E 6]。图1显示了当前QPD测试系统的示意图。归一化能量返回(NER),即将机械能返回到杆撞击前的杆的动能,作为QPD测试结果,将其绘制在撞击前的杆的动能。返回的机械能被定义为将力平方除以测量该力的打击乐杆中传感器的动态刚度。ner和时间可用于确定损失系数,一个阻尼参数,显示结构中的总能量耗散以及正常拟合误差(NFE),该参数表明裂纹的存在和严重程度和其他缺陷缺陷[1 E 4,6 E 9]。NER的较低振幅可以表明由于严重的缺陷或结构中有较高数量的特定缺陷(例如孔隙率)而导致结构的能量更多。

空间结构的主动阻尼、隔振和形状控制:教程
摘要:本教程回顾了作者在过去 35 年中对精密空间结构主动控制的贡献。它基于 2022 年 9 月在巴黎举行的 IAC-2022 宇航大会上的 Santini 演讲。第一部分致力于空间桁架的主动阻尼,重点是稳健性。通过使用分散的同位执行器-传感器对来实现保证的稳定性。所谓的积分力反馈 (IFF) 简单、稳健且有效,并且可以使用基于模态分析的简单公式轻松预测性能。这些预测已通过大量实验证实。桁架的阻尼策略已扩展到电缆结构,并已通过实验证实。第二部分解决了隔振问题:将敏感有效载荷与航天器引起的振动隔离开来(即姿态控制反作用轮和陀螺仪的不平衡质量)。讨论了基于 Gough-Stewart 平台的六轴隔离器;再次强调,该方法强调了稳健性。提出了两种不同的解决方案:第一种(主动隔离)使用分散控制器,该控制器具有并置的执行器和力传感器对,并具有 IFF 控制。结果表明,这种特殊的天棚实现方式与传统天棚不同,即使它连接的两个子结构是柔性的(大型空间结构的典型特征),也能保证稳定性。第二种方法(被动)讨论了松弛隔离器的电磁实现方式,其中线性阻尼器的经典阻尼器被麦克斯韦单元取代,导致渐近衰减率为 -40 dB/十倍,类似于天棚(尽管在电子方面要简单得多)。讲座的第三部分总结了最近在柔性镜控制方面所做的研究:(i)由压电陶瓷(PZT)致动器阵列控制的自适应光学(AO)平面镜和(ii)由压电聚合物致动器(PVDF-TrFE)阵列控制的球形薄壳聚合物反射镜,旨在部署在太空中。

康复外骨骼:一篇评论论文
6 计算机专业学生摘要随着康复外骨骼的出现,我们看到了康复治疗的革命。这些可穿戴机器人正在改变瘫痪患者和中风幸存者的命运,为康复带来新的希望。我们的团队一直在探索迷人的外骨骼设计世界,我们很高兴分享我们的见解。从机械设计到人机交互,这些设备正在突破康复评估和治疗的极限。在这篇评论中,我们将带您了解康复外骨骼技术的演变。我们将深入研究这些人工外骨骼背后的生物力学,研究关节机制和自由度。我们还将探索使精确运动控制成为可能的尖端传感器技术,如力传感器和惯性测量单元。此外,我们将研究个性化治疗的自适应控制算法,并分享临床试验的真实经验。到最后,您将清楚地了解这个领域的发展方向及其改变生活的潜力。关键词:康复外骨骼、辅助机器人、可穿戴外骨骼、神经康复技术、人机交互 (HRI) 康复外骨骼技术的演变 康复外骨骼的发展历程可谓非同寻常。从不起眼的开始到我们今天看到的尖端设备,这些可穿戴机器人彻底改变了康复治疗领域。 早期设计 用于康复目的的外骨骼概念开始形成于 20 世纪 60 年代。最初,这些设备体积庞大、固定式,主要用于在跑步机上训练患者并支撑体重。这些早期设计的例子包括 DGO、LOPES 和 ALEX 1。这些系统旨在减轻康复期间下肢的负荷,但它们的有限移动性限制了它们在临床环境中的使用。随着技术的进步,研究人员开始专注于开发便携式辅助外骨骼。到 21 世纪初,我们看到了 Ekso、ReWalk、Indego 和 Exo H2 1 等设备的出现。这些外骨骼旨在为因脊髓损伤而完全瘫痪的人提供最大程度的帮助。然而,它们仍然相对较重,重达 11 至 25 公斤 1 。

8 年级科学高级学术课程 (AAC) ...
• 评分阶段 1 • 评分阶段 2 • 评分阶段 3 • 评分阶段 4 过程标准描述了学生参与内容的方式。科学与工程实践 (SEP) 描述了学生为学习内容需要在课堂上进行的实践。反复出现的主题和概念 (RTC) 描述了学生需要如何思考内容才能学习它。科学与工程实践 8.1A 根据从文本、现象、模型或调查中观察到的信息提出问题并定义问题。8.1B 使用科学实践来计划和开展描述性、比较性和实验性调查,并使用工程实践来设计问题的解决方案。8.1C 在实验室、教室和现场调查期间使用适当的安全设备和实践,如德克萨斯州教育署批准的安全标准中所述。 8.1D 使用适当的工具,如量筒、米制尺、元素周期表、天平、秤、温度计、温度探头、实验室器皿、计时装置、 pH 指示剂、加热板、模型、显微镜、载玻片、生命科学模型、培养皿、解剖工具包、磁铁、弹簧秤或力传感器、模拟波行为的工具、卫星图像、天气图、手持放大镜以及实验室笔记本或日志。8.1E 使用国际单位制 (SI) 收集定量数据,并以定性数据为证据。8.1F 使用反复试验和方法组织数据,构建适当的表格、图形、地图和图表。8.1G 开发和使用模型来表示现象、系统、过程或工程问题的解决方案。8.1H 区分科学假设、理论和定律。8.2A 确定模型的优点和局限性,例如其大小、属性和材料。8.2B 通过识别任何重要的描述性统计特征、模式、错误来源或局限性来分析数据。 8.2C 使用数学计算来评估数据中的定量关系。8.2D 评估实验和工程设计。8.3A 提出解释并提出由数据和模型支持的解决方案,并与科学思想、原理和理论相一致。8.3B 在各种设置和形式中单独或协作地交流解释和解决方案。8.3C 使用应用科学解释和实证证据进行科学论证。8.4A 将过去和当前的研究对科学思想和社会的影响联系起来,包括科学过程、成本效益分析以及与内容相关的不同科学家的贡献。8.4B 通过评估来自多个适当来源的证据来评估所使用的可信度、准确性、成本效益和方法,从而做出明智的决策。