XiaoMi-AI文件搜索系统
World File Search System动作

实时识别脑电图上的运动想象动作...
摘要 脑机接口 (BCI) 处理算法需要强大的计算设备才能实时执行。在本文中,提出了一种用于对代表两个运动想象任务的脑电图 (EEG) 信号进行分类的硬件高效设计,并在现场可编程门阵列 (FPGA) 上实现。小波包分解 (WPD) 用作特征提取算法,线性判别分析 (LDA) 用作分类器。该系统是使用 System Generator 设计的,并使用硬件/软件联合仿真在 Zybo 板上实现。仿真结果显示,在两个运动想象任务的分类过程中准确率为 80%,时钟频率为 1.5 MHz 时延迟为 7.5 毫秒,功耗为 0.102 W。此外,所使用的 FPGA 资源量少于以前的类似工作,证明设计系统不仅实现了良好的准确性,而且以高效的方式实现了这一目标。
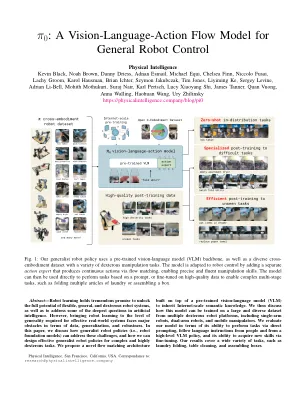
π0:视觉-语言-动作流模型
人工智能系统的形式和规模各有不同,有高度专业化的系统可以解决人类思维无法解决的复杂问题,比如预测蛋白质的构象 [ 21 ],也有可以根据文本提示生成逼真的高分辨率图像或视频的系统 [ 40 ]。然而,人类智能超越机器智能的最大优势是多功能性:能够解决不同物理环境中的不同任务,同时对环境约束、语言命令和意外干扰做出智能响应。人工智能在实现这种多功能性方面最实质性的进展或许体现在大型语言和视觉语言模型 [ 1, 48 ] 中:这些系统先在网络上的大量且非常多样化的图像和文本语料库上进行预训练,然后使用更精心策划的数据集进行微调(“对齐”),以诱导所需的行为和响应模式。虽然这些模型已被证明具有广泛的指令遵循和解决问题的能力 [ 53 , 27 ],但它们并不像人类那样真正地存在于物理世界中,它们对物理交互的理解完全基于抽象描述。如果这些方法要在人工智能系统方面取得切实进展,使其表现出人类所拥有的那种物理情境多功能性,我们将需要使用物理情境数据(即来自具身机器人代理的数据)对它们进行训练。灵活的通用模型可以执行各种机器人行为,具有巨大的实际意义,但它们也可能为当今机器人学习面临的一些最严峻的挑战提供解决方案,例如数据的可用性、泛化和鲁棒性。在自然语言 [ 1 ] 和计算机视觉 [ 39 ] 中,在各种多任务数据上预先训练的通用基础模型往往优于狭义的和专门的模型
导航过渡融资:动作清单
脱碳化行业的努力需要一种协作方法。高发射公司必须制定战略和实施环境可持续的实践;投资者和金融家必须通过资本分配和管理来促进减少排放;政府需要激励脱碳并促进过渡金融市场的发展。基于对马斯达尔(2023)在高发射业中工作的500名高级管理人员的调查,但是,只有40%的受访者制定了将净净纳入零的计划。根据高盛研究(Tylenda,Chen,Aggarwal和Corbett 2023)的说法,过渡策略在2023年7月在管理中的资产(AUM)总计500亿美元,占AUM的0.2%,占AUM的0.2%,通过促进或针对EU中销售的可持续性的投资基金。此外,许多政府尚未澄清哪些构成过渡活动和过渡融资。
碳动作计划2024 - 2030
使用了理事会各种来源的数据。使用不同的度量单位对这些源数据进行量化。例如,获得的一些数据表示为汽油或柴油的液体燃料升;有些是天然气或电力的千瓦时;有些是距离车的距离;有些票价是在火车,公共汽车或飞机上进行的旅程中发生的。在每种情况下,这些数据都会转换为单个CO2E的度量。用二氧化碳来表达理事会的总温室气体排放,已使用政府定义和发表的转换因子。每年政府审查这些转换因素,以维持最新和准确的报告。
朴次茅斯市的碳动作计划
该碳动作计划(CAP)是第一份年度报告,详细介绍了朴次茅斯市的碳排放。此上限描述了所使用的方法,历史和当前的排放,朴茨茅斯市议会(PCC)正在采取的行动以及对未来排放的投影。由总体气候变化策略提供了支持,该战略详细介绍了PCC指导原则和战略优先领域。

动作由分钟第13分钟删除,-net
第17节的东南区(她看到)的西南区,以及东北区的西北区(NH,NE,NE),第20节,乡镇14 South,South,S.B.B. 16号,范围16 East。和M.并授权执行官向小尤金·苏利·汉考克(Eugene Sully Hancock)发出。 ,为期两年的勘探许可证授权地热能勘探,矿水,非氢气气体以及除
MSCI气候动作索引方法
如果非索引成分获得现有索引成分,则将从索引中删除现有组成部分,并且不添加非组成部分将不会添加到索引中。安全特性的变化,如果特征发生变化(国家,行业,大小段等),安全性将继续成为索引组成部分。将在随后的索引审查中进行持续纳入指数的重新评估。有关与此指数相关的公司事件的具体处理的更多细节和说明可以在“ MSCI公司事件方法论”书籍中找到,详细介绍了限制的加权和非市场资本化加权指数中事件的处理。
2024视觉零动作计划
在整个美国,运输工程师研究所(ITE)鼓励视力零社区采用安全系统方法,因为它会改善安全结果(请参阅ITE技术资源)。在华盛顿,安全系统的方法在2019年全州目标零计划中得到认可:“现在是华盛顿在其政策,计划,项目,活动和投资中全州采用安全系统原则的时候了。当我们这样做时,我们将挽救生命,提供更好的公共资源管理,并改善使用它的每个人的运输系统的功能。”
最终EV动作清单(2023年8月)
免责声明:此文件是由DVRPC电动汽车工作队准备和审查的,不是官方指导或培训来源。DVRPC严格用作咨询机构。进行建议的实际权限仅在于有责任执行运输政策的理事机构。以下建议是基于当地行业的最佳实践,应与动手培训和单个车辆手动说明一起进行。在发生电动汽车事件之前,应对所有人员进行适当的培训。

第 31 章:运动单元和肌肉动作
典型的肌肉由数千条并行工作的肌纤维组成,这些肌纤维被组织成较少数量的运动单位。运动单位由运动神经元及其所支配的肌纤维组成,这里用运动神经元 A1 表示。支配一块肌肉的运动神经元通常聚集在一个细长的运动核中,该运动核可能延伸到脊髓腹侧的一到四个节段。运动核的轴突通过几条腹根和周围神经离开脊髓,但被收集到靠近目标肌肉的一个神经束中。在图中,运动核 A 包括支配肌肉 A 的所有运动神经元;同样,运动核 B 包括支配肌肉 B 的所有运动神经元。每个运动神经元(图中未显示)的广泛分支的树突往往与来自其他核的运动神经元的树突混合在一起。