XiaoMi-AI文件搜索系统
World File Search System动态运动
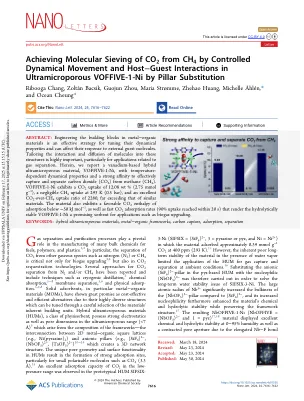
通过控制动态运动和主客体相互作用在超微孔 VOFFIVE-1-Ni 中实现从 CH4 分子筛分 CO2 (通过 Pillar Su)
摘要:设计金属有机材料中的构建块是调整其动力学性质的有效策略,并且可以影响其对外部客体分子的响应。定制分子在这些结构中的相互作用和扩散非常重要,特别是对于与气体分离相关的应用。在此,我们报告了一种钒基混合超微孔材料 VOFFIVE-1-Ni,它具有依赖于温度的动力学性质和强大的亲和力,可以有效捕获和分离二氧化碳 (CO 2 ) 和甲烷 (CH 4 )。VOFFIVE-1-Ni 的 CO 2 吸收率为 12.08 wt % (2.75 mmol g − 1 ),在 293 K (0.5 bar) 下 CH 4 吸收量可忽略不计,CO 2 与 CH 4 的吸收比极好,为 2280,远远超过同类材料。该材料还表现出低于 −50 kJ mol −1 的良好 CO2 吸附焓,以及快速的 CO2 吸附速率(20 秒内达到 90% 的吸收率),这使水解稳定的 VOFFIVE-1-Ni 成为沼气升级等应用的有前途的吸附剂。关键词:混合超微孔材料、金属-有机骨架、碳捕获、吸附、分离

临床心理药物学使荒谬的简单
多年来,就重大精神障碍的病因和治疗而言,精神病学进行了辩论。出现了两个相对的营地:生物学的养生者,其奉献者认为精神疾病有有机的基础;和以心理为导向的精神病学,可能最能以精神动态运动为代表,其转变为当前的情绪压力源,幼儿创伤,人际交往问题和心理内部的作用,作为因果关系,是在精神症状学发展中的因果因素。尽管这些极地观点仍然存在,但近年来,人们有一种新兴观点,其中包括许多精神疾病的病因和治疗中的心理和生理因素。在许多(如果不是大多数)的精神障碍中,想到连续性或频谱是有帮助的。几乎所有精神障碍通常代表异质综合症。

移动机械手性能测量研究综述
本调查为移动机械手性能测量领域的研究提供了基础,与其他移动机械手研究领域相比,该领域的研究文章相对较少。调查提供了移动机械手研究的文献综述,并提供了实验应用示例。调查还提供了一份详尽的规划和控制参考文献清单,因为这是移动机械手的主要研究重点,也是系统性能测量的因素。然后,调查回顾了移动机器人、机械臂和移动机械手的性能指标以及测量其性能的系统,包括通过动态运动跟踪系统的机床测量系统。最后,调查包括一个关于机器人、移动机器人和移动机械手性能测量研究的部分,从校准、标准和移动机械手工件开始,这些工件正在考虑用于评估移动机械手的性能。

运动原始扩散:学习可变形物体的轻柔机器人操纵
摘要 - 机器人辅助手术(RAS)中的policy学习缺乏数据效率和多功能方法,这些方法表现出对于精致的手术干预的所需运动质量。为此,我们介绍了运动原始扩散(MPD),这是一种在RAS中模仿学习的新方法(IL),重点是轻柔地操纵可变形物体。该方法结合了基于扩散的模仿学习(DIL)的多功能性与概率动态运动原始基原始(PODMP)的高质量运动产生能力的多功能性。这种组合启动MPD可以轻柔地操纵可变形物体,同时保持数据效率对于稀缺的RAS应用至关重要。我们在状态和图像观察中评估了各种模拟和现实世界机器人任务的MPD。MPD在成功率,运动质量和数据效率方面优于最先进的DIL方法。项目页面:scheiklp.github.io/movement-promistive-diffusion

研究重点领域 02/2024
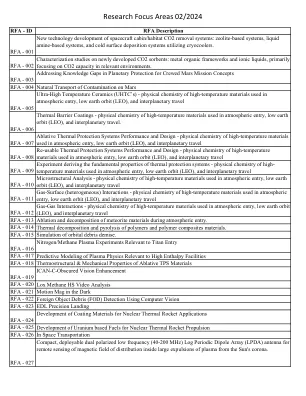
RFA - 115 摄影测量方法测量结构的动态运动并验证动态模型 RFA - 116 结构健康监测和损伤检测算法 RFA - 117 CO2 捕获 RFA - 118 CO2 去除 RFA - 119 CO2 利用 RFA - 120 CO2 转化为增值产品 RFA - 121 高比能电池(>250 Wh/kg),具有从 -60 到 +100 °C 的极端温度范围能力 RFA - 122 具有高比能(>250 Wh/kg)的高倍率电池(能够放电到 >20C) RFA - 123 用于微重力航天器舱环境的机组人员佩戴的约束装置和移动辅助设备 RFA - 124 与微重力和分数重力域兼容的机组人员宿舍内部结构 RFA - 125 通用栖息地建筑的维修、制造和加工 (RMAF) 设施 RFA - 126内陆水域浮游植物生物多样性(南非 - NASA BioSCape 项目)

研究重点领域 01/2024
RFA - 113 太空环境中的自愈金属 RFA - 114 航天器结构修复的自主方法 RFA - 115 用于测量结构动态运动和验证动态模型的摄影测量方法 RFA - 116 结构健康监测和损伤检测算法 RFA - 117 CO2 捕获 RFA - 118 CO2 去除 RFA - 119 CO2 利用 RFA - 120 CO2 转化为增值产品 RFA - 121 高比能电池(>250 Wh/kg),具有从 -60 到 +100 °C 的极端温度范围能力 RFA - 122 高比能(>250 Wh/kg)的高倍率电池(能够 >20C 放电) RFA - 123 用于微重力航天器舱环境的机组人员佩戴的约束装置和移动辅助设备 RFA - 124 与微重力和分数重力域兼容的机组人员宿舍内部结构 RFA - 125通用栖息地建筑 RFA 的修复、制造和制作 (RMAF) 设施 - 126 内陆水域浮游植物生物多样性(南非 - NASA BioSCape 项目)

从动态环境中多步操作任务的演示中的逻辑学习
摘要 - 从演示中学习(LFD)是将类似人类技能授予机器人的有效框架。然而,设计一个能够无缝模仿,推广和反应在动态环境中长期地平线操纵任务的干扰的LFD框架仍然是一个挑战。为了应对这一挑战,我们提出了Logic-LFD,该逻辑LFD将任务和运动计划(TAMP)与动态运动原始词(DMP)的最佳控制配方相结合,从而使我们能够合并运动级别的Via-via-via-via-via-via-vie-vie-aint-vie-viarpoint规范并处理任务级别的变化或动态环境中的干扰。我们对我们提出的方法对几个基线进行了比较分析,从而评估了其在三个长马操纵任务中的概括能力和反应性。我们的实验证明了逻辑LFD的快速概括和反应性,用于处理任务级别的变体和长距离操纵任务中的干扰。项目网页:https://sites.google.com/view/logic-lfd

顶级空手道运动员的诺斯替函数水平 - 飞行员...
高质量的感觉知觉和身体方案(体积认知)是运动表现的重要方面。这项研究比较了36名竞争性空手道运动员组中的立体认知,身体方案和动力学与32名普通人群参与者的对照组。立体认知Petrie测试,两个身体方案测试和三个运动障碍测试是结果测量工具。在立体认知的Petrie测试中未发现显着差异(p = .389)或非主导者(p = .791)手,也没有在Kinesthisia测试中(Domi-Nant,P = .661和Nondominant,p = .051)。空手道运动员在身体方案测试中表现出色,即第五宽度估计(p = .024)和肩部宽度估计(p = .019),以及空手道特异性的基因斯封测试,即单拳(p = .010)和triple punch(p = .010)和triple punch(p = .010)。这项研究证实,与一般人群相比,在执行快速动态运动时,竞争性空手道运动员的体分症明显更好,并且准确性更好。

Exentric到中心的视频生成-NIPS Papers
我们介绍了Exo2EGO-V,这是一种新颖的以外为中心为中心的基于质量扩散的视频生成方法,用于日常生活熟练的人类活动,其中稀疏4-视图中心的观点在现场周围配置了360°。由于外主和以自我为中心的观点和动态运动和现实世界中日常生活环境之间的显着差异,此任务尤其具有挑战性。为了应对这些挑战,我们首先提出了一种新的基于扩散的多视图外科编码器,以从多视图exentric视频中提取密集的多尺度功能,作为以自我为中心视频的外观条件。然后,我们在提供空间对立的自我中心特征之前设计了一个自以为是至中心的视图翻译,作为对以egipentric视频扩散模型的输入的串联指导。最后,我们将时间关注层引入我们的以自我为中心的视频扩散管道中,以改善温度一致性跨eg中心框架。广泛的实验表明,Exo2EGO-V从EGO-EXO4D数据集中显着超过SOTA方法,而LPIP的平均为35%。我们的代码和模型将在https://github.com/showlab/exo2ego-v上提供。