XiaoMi-AI文件搜索系统
World File Search System参数

使用受控衰减参数作为参考
目的:本研究的目的是使用受控的衰减参数(CAP)基于脂肪变性级别作为参考标准,研究用于评估肝脂肪变性的射频(RF)数据分析的定量超声(US)参数的价值。方法:我们通过RF数据采集和CAP测量分析了243名B模式肝脏的参与者。在B模式US图像上,肝脂肪变性在视觉上进行评分(0/1/2/3,无/中度/中/重度),并计算了肝烯元指数(HRI)。测量了肝实质的RF数据分析,组织散射 - 分布成像参数(TSI-P)和组织衰减成像参数(TAI-P)。US参数与基于CAP的脂肪变性等级(S0/1/2/3,无/中等/重度)相关,并使用接收器操作特征(ROC)曲线分析评估其诊断性能。进行了多元线性回归分析,以识别TSI-P和TAI-P的决定因素。结果:在CAP测量值上,参与者分类为具有S0(n = 152),S1(n = 54),S2(n = 14)和S3(n = 23)的参与者。tsi-p和tai-p与脂肪变性级显着相关(ρ= 0.593和ρ= -0.617,两者的p <0.001)。用于预测≥S1,≥S2和S3,TSI-P的ROC曲线(AUC)下的面积为0.827/0.914/0.917; Tai-P,0.844/0.914/0.909;视觉分数为0.659/0.778/0.794;和HRI分别为0.629/0.751/0.759。TSI-P和TAI-P的AUC明显高于视觉评分或HRI≥s1或≥S2(P≤0.003)。结论:从美国RF数据中得出的TSI-P和TAI-P可能有助于检测肝脂肪变性并评估其严重程度。在多变量分析中,基于瞬态弹性摄影级(p = 0.034)和脂肪变性级(p <0.001)是TSI-P的独立决定因素,而脂肪变性级(P <0.001)是TAI-P的独立决定因素。

自动驾驶车辆的自动参数调整
摘要 - 现代自动化驾驶解决方案利用少量的计划和控制组件,其中需要对不同的驾驶情况和车辆类型进行调整,以实现最佳性能。本文提出了一种自动调整此类参数的方法,以重新进行专家演示。我们利用一个成本函数,该成本函数捕获了控制器与记录所需驾驶行为的闭环操作的偏差。参数调整。在一个案例研究中比较了三种优化替代方案,在案例研究中,在现实世界驾驶的情况下,轨迹规划师为车道调整了轨道。结果表明,即使在嘈杂的演示数据方面,提出的方法也可以显着改善手动调整的初始参数。

微波光子的参数可编程延迟线
存储量子信息的延迟线对于推进量子中继器和硬件高效的量子计算机至关重要。传统上,它们被实现为支持波传播但对传播场提供有限控制的扩展系统。在这里,我们引入了一种参数寻址的微波光子延迟线,它对存储的脉冲提供了高水平的控制。通过参数驱动与一组谐振器弱混合的三波混频电路元件,我们设计了一种模拟物理延迟线的光谱响应,同时提供对延迟线属性的快速控制。我们通过选择发射哪个光子回波、及时转换脉冲甚至交换两个脉冲来展示这种新颖的控制程度,所有这些脉冲的能量都与单个光子的数量级相当。我们还测量了参数相互作用所增加的噪声,发现它远小于一个光子。
毫瓦阈值可见电信光学参数...
在可见波长下片上创建相干光对于光谱和计量系统的现场部署至关重要。虽然在特定情况下已经实现了片上激光器,但是尚未报道不受特定增益介质限制的通用解决方案。在这里,我们提出使用硅纳米光子学通过宽分离的光参量振荡 (OPO) 从红外泵浦产生可见光。OPO 使用 900 nm 泵浦分别在 700 nm 和 1300 nm 波段产生信号光和闲置光。它以 (0.9 ± 0.1) mW 的阈值功率工作,比其他仅在红外领域报道过的宽分离微腔 OPO 工作小 50 倍以上。这种低阈值使得直接泵浦成为可能,而无需中间光放大器。我们进一步展示了如何修改设备设计以产生具有相似功率效率的 780 nm 和 1500 nm 光。我们的 nanophotonic O PO 在功率效率、操作稳定性和设备可扩展性方面表现出了独特的优势,并且是朝着灵活地在芯片上产生相干可见光迈出的一大步。
航空成像最重要的相机参数
相机通常配备两种快门之一 - 全局快门或滚动快门。滚动快门是指一次快速连续地曝光传感器的每一行,而全局快门则一次曝光所有像素。如果物体在曝光期间以高速穿过画面,则滚动快门容易使物体模糊或产生污点。全局快门通过同时曝光每个像素来冻结移动物体,从而消除这些伪影。传统上,只有 CCD 传感器可以与全局快门配合使用,而滚动快门功能则留给 CMOS 传感器。但是,由于 CMOS 技术已经主导了 CCD,现在有几种类型的高质量全局快门 CMOS 传感器可供选择,例如索尼的 Pregius 传感器以及滚动快门传感器(如索尼 Starvis 传感器)。

焊接摩擦参数对机械的影响...
4学院科技大学校长。摘要在本文中,铝业行业应用摩擦焊接用于维修操作。修复阳极轭的过程是通过传统方式焊接进行的,被旋转摩擦焊接的方法所取代,因为摩擦焊接机的设计,制造和组装了,并执行了焊接过程。选择用于研究和实验的材料是低碳钢S37和Rod Dia。ϕ 130 mm。使用了配备有75kW电动机的电动机的旋转摩擦机的设置。旋转摩擦的焊接过程是在阳极式轭引脚上进行的,该旋转式轭钉在被融合焊接之前进行焊接之前。检查了换针旋转摩擦焊接中微结构和拉伸强度的特征。微观结构测试显示,与由于重结晶和将粗铁氧体相变成晶粒精制铁素体铅层相比,与熔融焊接焊接相比,摩擦焊接销的晶粒尺寸较小。由于退火效果,摩擦焊接引脚的拉伸强度高于融合焊接销的拉伸强度。关键字旋转摩擦焊接,铁质不锈钢,拉伸强度,锻造压力,微结构。国际环境使其能够将产品出口到国外。从这个角度来看,埃及铝制公司渴望在提取铝的各种过程中探讨现代方法,以实现国际引言政府和国际机构对更好的环境以及减少各种行业的环境有害排放的永久愿望已成为公司管理的主要关注点,尤其是那些将其产品出口到国外的人,因为有法律可以在制造这些产品期间跟踪生产公司并评估它们以符合标准。
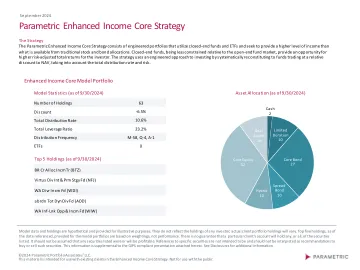
参数增强收入核心策略
* 超过 1 年的期间按年计算。成立日期:2013 年 8 月 1 日。模型回报来源:Parametric、FactSet Research Systems、Morningstar。CEFA 图表来源:Parametric、Morningstar® 截至 2024 年 9 月 30 日。CEFA 模型表现为假设,仅供说明之用。它并不反映实际投资者的结果,不应依赖它来做出投资决策。模型表现以扣除费用(35 个基点)和估计交易成本后的毛利和净额呈现,并反映收益的再投资。少于一年的期间的表现尚未按年计算。此信息是对此处随附的 GIPS 合规演示文稿的补充。提供指数是为了比较。不可能直接投资于不受管理且不反映费用或开支扣除额的指数。所有投资都面临损失风险。有关更多信息,请参阅披露。

评估泡沫不锈钢的制造参数...
抽象背景del妄是一种临床症状,可能在患者中产生严重的副作用,并且表现出可逆性。术后ir妄是手术后直接或间接影响患者的重要神经心理学并发症。心脏手术由于手术程序的复杂性,术中和术后麻醉药的使用以及其他药理学剂以及可能的术后并发症而增加了ir妄的风险。这项研究旨在确定心脏手术后del妄的发展与其因果关系的发展及其相关的术后补充之间的关系,并确定术后del妄的高相关风险因素。方法由730名接受重症监护病房并接受心脏手术的患者组成。根据患者的医疗信息记录,收集的数据包括19个风险范围。作为一种ir妄诊断工具,我们使用了重症监护irrium筛查清单,其中四个或更多点表示del妄。用于统计分析,根据del妄的存在或不存在因变量,而独立变量是根据del妄的风险因素确定的。t检验,χ2检验和逻辑回归分析分析是在两组之间的危险因素上进行的 - del妄组和没有del妄组。在心脏手术后730名患者中,有126例(17.3%)观察到术后di妄。术后并发症在del妄组中更为常见。在12个因素中的7个中发现了与术后del妄相关的独立危险因素。结论是心脏手术是侵入性的,并且会影响ir妄的发展和严重性,努力和干预方法对于预测手术前ir妄的危险因素,并防止手术后发生。将来有必要进一步研究可以直接干预的del妄的因素。
儿童基于游戏的认知发展参数
游戏对于儿童的一般发展至关重要,因为它促进了他们更具创造力和抽象的思维。当他们有机会参与时,他们可以充分参与游戏活动。通过游戏,孩子们学习如何解决自己为自己创造的挑战以及其他认知思维过程。从婴儿到青少年或成人,认知发展是指智力过程的形成,例如记住,解决问题和做出决定。根据最近的研究,Play改善了孩子的想象力,记忆,推理,社交技能,语言水平,创造力和心理健康,所有这些对于形成他们的未来至关重要。这项调查的主要目的是通过审查相关文献来评估儿童认知发展的维度。本研究采用了描述性定性研究方法来实现这一目标。这项研究得出的结论是,游戏在儿童的认知发展中起着重要作用。根据这项评论研究,游戏机会帮助孩子在心理上保持快乐,父母和老师在提供他们方面很重要。关键字:认知发展参数,游戏,儿童,解决问题,决策,创造性思维。1。简介

用epivariant神经网络的机器学习哈伯德参数
具有扩展Hubbard功能(DFT + U + V)的密度功能理论提供了一个可靠的框架,可以准确描述包含过渡金属或稀有元素的复杂材料。它是通过减轻半本地功能固有的自我相互作用误差来做到的,该误差在具有部分填充D和F电子状态的系统中特别明显。但是,在这种方法中实现准确性取决于现场U和现场v哈伯德参数的准确确定。在实践中,这些是通过半经验调整,需要先验知识或更正确地通过使用预测但昂贵的第一原理计算来获得的。在这里,我们提出了一种基于模棱两可的神经网络的机器学习模型,该模型使用原子占用矩阵作为描述符,直接捕获了手头系统的电子结构,局部化学环境和氧化状态。我们在这里以迭代性线性响应计算为单位计算的哈伯德参数的预测,如密度功能性扰动理论(DFPT)和结构放松。值得注意的是,当对跨越各种晶体结构和组成的12个材料的数据进行培训时,我们的模型分别达到了Hubbard U和V参数的平均相对误差,分别为3%和5%。通过规避计算昂贵的DFT或DFPT自洽协议,我们的模型可以显着加快用可忽略的计算开销的哈伯德参数的预测,同时接近DFPT的准确性。此外,由于其可靠性的可传递性,该模型通过高通量计算促进了加速的材料发现和设计,与各种技术应用相关。