XiaoMi-AI文件搜索系统
World File Search System反馈控制

自主机器人简介...
特征值提供了有关系统的稳定性,控制和动态行为的见解。在控制理论中,它们通过分析系统矩阵的特征,例如代表机器人动力学或控制定律的特征来帮助确定系统的稳定性。特征值指示系统将如何随着时间的推移而响应状态,这对于运动计划,操纵和反馈控制等任务至关重要。如果特征值具有负实际零件,则系统是稳定的;如果阳性,它可能是不稳定的,这对于设计健壮的机器人系统至关重要。
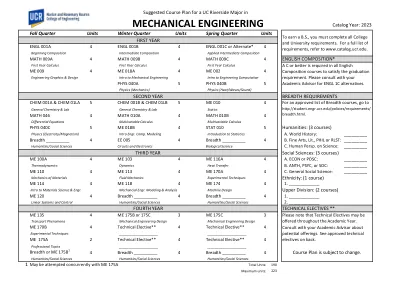
机械工业
通用机械工程材料与结构 ME 100B:热力学 (4) ME 100B:热力学 (4) ME 116B:传热 (4) ME 116B 传热 (4) ME 117:燃烧与能源系统 (4) ME 121:反馈控制 (4) ME 121:反馈控制 (4) ME 122 振动 (4) ME 122:振动 (4) ME 134:材料的微观结构转变 (4) ME 130:机构的运动学和动态分析 (4) ME 153:有限元方法 (4) ME 131:机构设计 (4) ME 156:材料的机械行为 (4) ME 133:机电一体化简介 (4) ME 157:ME 134:ME 158:ME 136:能源产品对环境的影响与转换 (4) ME 180: 工程中的光学与激光 (4) ME 137: 环境流体力学 (4) *ME 197: 本科生研究 ME 138: 生命系统中的传输现象 (4) ME 140: 船舶理论 (4) ME 144: 设计与制造 ME 145: 机器人规划与运动学 (4) ME 121: 反馈控制 (4) ME 153: 有限元方法 (4) ME 122: 振动 (4) ME 156: 材料的机械行为 (4) ME 130: 机构的运动学和动态分析 (4) ME 157: ME 131: 机构设计 (4) ME 158: ME 133: 机电一体化概论 (4) ME 175D: 技术创业 (4) ME 140: 船舶理论 (4) ME 176 可持续发展产品设计 (4) ME 144:机器人技术简介 (4) ME 180:工程中的光学与激光 (4) ME 145:机器人规划与运动学 (4) *ME 197:本科生研究 ME 153:有限元方法 (4) ME 156:材料机械行为 (4) 能源与环境 ME 175D:技术创业 (4) ME 100B:热力学 (4) ME 176 可持续产品设计 (4) ME 116B:传热 (4) ME 180:工程中的光学与激光 (4) ME 117:燃烧与能源系统 (4) *ME 197:本科生研究 ME 136:能源产品对环境的影响与转换 (4) ME 137:环境流体力学 (4) ME 138:生物系统中的传输现象 (4) *ME 197:本科生研究

在有限时间
摘要 - 该纸张介绍了在主要道路上合并到排中的坡道车辆的纵向控制概率。为了应对这一挑战,提出了具有专门反馈控制定律的有限时间模型预测控制(MPC)算法。设计了状态错误的约束集,并基于此建立了决策方案,以允许坡道车辆在设计的MPC策略下开始评估一开始合并操作的可行性。如果合并是可行的,则提议的MPC策略将用于将坡道车辆驱动到所需状态周围的小邻居,并根据排的速度和在有限的时间步骤中的位置,然后再加入排队。此外,通过共同设计的反馈控制法实现了渐近趋同倾向到所需状态。否则,将不会触发MPC策略,而是一种替代方法,例如放慢坡道车辆以创造空间并允许主道上的车辆前进。在提出的方法下,在所有时间步骤中都实现了MPC优化问题的递归可行性,并且可以在MPC算法下证明与所需状态小社区的有限时间收敛。也得出了收敛时间步骤的上限,该界限用于证明决策机制的有效性。另外,还保证了坡道车辆的闭环约束满意度和渐近稳定性。通过模拟示例证明了所提出的MPC方法的有效性。
自我修复混凝土技术的具体进步-IJRPR
多功能性和智能系统:扩大无法修复的自我修复材料的功能,包括感应,自适应行为和多功能功能,是未来研究的有希望的方向。挑战包括传感和驱动机制的整合,自我诊断系统的发展以及实施反馈控制循环以进行自主修复。未来的研究应探讨自我修复材料和新兴技术(例如人工智能,物联网(IoT)和高级传感器)之间的协同作用,以创建智能,适应性的材料和结构。

MT300 数字压力计 - 横河
燃油压力传感器的开发和评估 汽油直喷发动机的使用范围正在扩大,成为提高燃油经济性的有效手段。该发动机系统使用高压喷射器,可在高达 20 MPa 的压力下输送最佳量的燃油,并采用高精度空燃比反馈控制,以提高发动机功率和燃油效率。燃油压力控制对于维持和提高发动机性能非常重要。MT300 高压范围型号是燃油压力传感器开发、评估和校准的理想选择。

带隔离放大器的隔离电源反馈环路设计
误差放大器作为开关电源设计中的重要元件,用于将输出电压的误差信号放大,并根据误差信号产生反馈控制。误差放大器的性能直接影响开关电源的输出精度和瞬态响应。在传统的隔离电源设计中,通常使用光耦来实现隔离误差信号的传输,如图2所示。本应用笔记对基于光耦的方案和基于隔离放大器的方案(CA-IS310x)进行了比较,并讨论了CA-IS310x在隔离开关电源设计中的优势,并给出了典型应用中的反馈环路分析和设计建议。2 隔离电源工作原理

博士学位:新一代空间任务的遗传现象的建模和控制
倾斜是部分填充的储层中液体的运动。建模和控制这种现象对于登陆液体推进剂的空间系统的稳定性和性能至关重要。倾斜被确定为在近地球小行星会合(近)任务中观察到的效率低下的动量阻尼的主要原因,并怀疑是上层阶段不稳定的原因,这是使2007年失去猎鹰1任务的上层不稳定。此外,将人类带回月球及以后的太空探索的新趋势是需要更大的液体推进液罐面对更长的任务。这在安全性和操纵控制性能方面提出了新的挑战。如今,只有计算流体动力学(CFD)模型才能捕获微功能条件下的斜率现象,其中表面张力力在重力上占主导地位,并且对地球上的表面形成不同。但是,这种数值方法在计算上太昂贵了,无法通过保证的稳定性和性能证书来利用基于模型的反馈控制合成。此外,晃动也可以与柔性附属的自然振荡模式相互作用(即太阳能电池板,机器人臂,天线)并大大放大。该博士的目标是多学科的,旨在最终加入非常不同的研究领域(流体动力学,多体型建模和自动控制)的路径。最终目标是提供一个通用框架,以实时正确模拟微实力中宽恕现象的耦合效应,并在反馈控制下具有复杂的灵活空间结构的振动效果。许多应用程序仍在开放的应用程序:精细的任务,会合和对接(用于加油),积极的碎屑清除和发射器沿海阶段。
ECE 380:控制系统 - 普渡大学工程系
示例 3(倒立摆)。假设我们尝试在手掌中垂直平衡一根棍子。此示例中的传感器、控制器和执行器分别是我们的眼睛、大脑和手。这是一个反馈控制系统的示例。现在,如果我们闭上眼睛尝试平衡棍子会发生什么?棍子不可避免地会掉下来。这说明了另一种控制,称为前馈或开环控制,其中系统的输入不依赖于输出。如本例所示,前馈控制对干扰不具有鲁棒性——如果棍子开始时没有完全平衡,或者我们的手稍微移动,棍子就会掉下来。这说明了反馈控制的好处。

信息物理系统接口中的混合神经网络......
人工神经网络技术旨在为未来的机器提供完全的自主性,即自主控制和决策,依靠先前的经验和分析,而无需人类的直接参与。人工神经网络是生物神经网络的模型,用于解决算法未知的问题 [1-3]。如前所述,发动机转速控制可以通过反馈控制和 PID 控制器来实现。事实上,标准 PI (D) 控制律构成了绝大多数现代电子柴油机控制器的主要线性模块。然而,控制原理是基于推进系统传递函数的标准形式,使用传递函数和热力学、物理化学过程(例如燃烧)中固有的任何非线性的线性化。