XiaoMi-AI文件搜索系统
World File Search System地面

引用:Sai Swethaa Shaik Hussain。 “打破新的地面:世界上的第一颗牙齿 - 再生蛋白针对临床试验的靶向疗法!”。
引用:Sai Swethaa Shaik Hussain。“打破新的地面:世界上的第一颗牙齿 - 再生蛋白针对临床试验的靶向疗法!”。Medicon医学科学7.4(2024):01-02。

U-SURF:全球1公里在空间连续的城市地面财产数据集,用于公里尺度的城市分辨地球系统建模
图1。城市峡谷的概念示意图代表CLMU中的城市景观(改编自Oleson等,2008a)。特性是颜色编码的:蓝色用于辐射,橙色用于热和绿色的形态学。请注意,屋顶和壁厚(尽管与城市形态相关)被认为是热特性,因为它们主要用作加权因素,以计算CLMU中峡谷表面的传导通量(Lawrance等,2018; Oleson等人,2010年)。165

基于自主地面车辆的基于增强学习的运动计划深度回归的不确定性定量指标
在机器人或其他物理系统上部署深层神经网络时,学到的模型应可靠地量化预测性不确定性。可靠的不确定性允许下游模块推理其行动的安全性。在这项工作中,我们解决了不确定性量化的指标。具体来说,我们专注于回归任务,并研究稀疏误差(AUSE),校准误差(CE),Spearman的等级相关性和负模样(NLL)下的区域。使用多个数据集,我们研究了这些指标在四种典型类型的不确定性下的行为,它们在测试集的大小上的稳定性以及揭示其优势和缺点。我们的结果表明,校准误差是最稳定,最容易解释的度量,但是Ause和NLL也具有各自的用例。我们不建议您评估不确定性的Spearman等级相关性,并建议用Ause代替它。

在太空飞行环境中和地面测试期间与减压疾病(DC)有关的专利孔(PFO)评估
•技术出版物。完成的研究或重大研究阶段的报告介绍了NASA计划的结果,并包括广泛的数据或理论分析。包括大量的科学和技术数据的汇编以及被认为具有持续参考价值的信息。NASA的同行评审正式专业论文的对应物,但对手稿的长度和图形演示范围的限制较小。•技术备忘录。初步或专业兴趣的科学和技术发现,例如,快速发布报告,工作论文和书目包含最少注释的书目。不包含广泛的分析。•承包商报告。NASA赞助的承包商和受赠人的科学和技术发现。
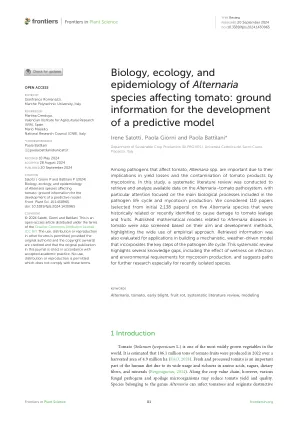
影响番茄的替代物种的生物学,生态学和流行病学:开发预测模型的地面信息
在影响番茄的病原体中,替代属。很重要,因为它们对霉菌毒素的产量损失和番茄产品污染的影响。在这项研究中,进行了系统的文献综述,以检索和分析有关替代性番茄病态系统的可用数据,特别关注病原体生命周期和霉菌毒素产生的主要生物学过程。我们考虑了五种替代物种的110篇论文(从最初的2,138篇论文中选择),这些杂物是历史上相关或最近鉴定出来的,以损害番茄叶和水果。发表的与番茄中替代性疾病有关的数学模型也根据其目的和开发方法进行了筛查,强调了经验方法的广泛使用。检索信息,以用于构建机理,天气驱动模型的应用,该模型结合了病原体生命周期的关键步骤。该系统评价突出了几个知识差距,包括湿度对霉菌毒素产生的感染和环境需求的影响,并为进一步的研究提出了途径,尤其是对于最近孤立的物种。

军事地面部署和配送司令部
运输帐户代码 (TAC)。四位字母数字代码由军事服务、机构或承包商提供,用于标识要收取运输服务费用的帐户。必须在 MSL 上输入跨洋 (POE/POD) 移动段的 TAC。有关 MSL 的更多要求,请参阅 MIL-STD-129R。

潜在的网络 - 地面项目 - countryside- ...
如果有足够的潜在参与者,格林牛顿将开发和发布向国家电网和合格公司提出的提议销售要求,该公司解决了社区网络网络的地热系统的开发和运营的所有方面在系统的每个房屋中绑定的过程和时间表,公司的义务以及计划长期维护和操作系统的义务和计划。
将潜在受体识别为地面源加热和冷却系统
科学研究和分析基于环境机构所做的一切。它有助于我们有效理解和管理环境。我们自己的专家与领先的科学组织,大学和Defra集团的其他部分合作,将最佳知识带入我们现在和将来面临的环境问题。我们的科学工作作为摘要和报告发表,所有人都可以免费获得。本报告是环境局首席科学家小组委托研究的结果。您可以在https://www.gov.uk/government/organisation/environment-agency/about/research上找到有关我们当前的科学计划的更多信息,如果您对此报告或环境局的其他科学工作有任何评论或疑问,请与Research@envorirnment-agencency.gov.uk联系。

与地面和基于卫星的传感器一起检测和跟踪空间对象
新技术是为了使用轨道碎片通过电离层时产生的等离子体波来跟踪空间中的小物体[1,2,3]。已经对计算机模拟和实验室测量进行了研究。原位观察结果证实了这些等离子体波的存在是在空间传感器与已知空间对象的结合过程中进行的。小空间物体通过结构化环境时,也可以使用接地传感器和远程卫星仪器检测到。阿拉斯加的HAARP HF设施通过产生对齐的违规行为(FAI)提供了这种结构化环境。空间碎片和卫星通过这些不规则性会激发血浆排放,例如惠斯勒,压缩alfvén或较低的杂种波。当带电的空间对象遇到FAI时,轨道动能转换为电磁等离子体振荡而产生了惠斯勒波动扰动[3。4]。吹口哨者在距离源区域约9000 km/s的范围内繁殖,可以在几个地球 - 拉迪的范围内检测到。在加拿大Cassiope/Swarm-E航天器上的原位电场探头已检测到100 km的快速磁波。检测后,需要空间碎片地理位置才能更新轨道预测模型。从主机传感器的原位测量值可以从空间中电磁(EM)等离子体波的测量值提供范围和到达角度。从目标对象形成e x b poynting通量,从而产生其源方向。到达的角度需要EM场的矢量传感器,以从空间碎屑中给出入射信号的电(E)和磁性(H)矢量成分。这个方向的时间历史记录允许估计目标轨迹通过主机传感器平台通过。当带电的目标碎片越过田间对齐的不规则性时,它会发射一个分散波形,作为惠斯勒下调或磁通型上的速度。来自源点的传播在这些信号中引起时间分散,这些信号在时间和空间范围内都延伸。匹配的带有小波的信号的滤波器处理,等离子波形可以在特定的生成时间确定范围到源的范围。
![在高度约束空间中的自主地面导航:从ICRA 2024的第三个谷仓挑战中学到的教训[竞赛]](/simg/a/a45ad0d3ef781c6f93dd0798ca55c767801ac4e4.webp)
在高度约束空间中的自主地面导航:从ICRA 2024的第三个谷仓挑战中学到的教训[竞赛]
第三个基准自动驾驶机器人导航(谷仓)挑战赛于2024年IEEE国际机器人和自动企业国际会议(ICRA 2024)举行,并继续评估高度紧缩环境中最先进的自治地面导航系统。与费城(北美)ICRA 2022和2023年第一和第二谷仓挑战的趋势类似,第三个在横滨(亚洲)的谷仓Challenge(欧洲)变得更加地区,即大多数是亚洲团队。比赛的规模略微缩小(六支仿真球队,其中四个被邀请参加物理比赛)。与过去两年相比,竞争结果表明该领域采用了新的机器学习方法,同时又略微融合了一些常见的实践。然而,物理参与的区域性质提出了一个挑战,以促进全世界更广泛的参与,并提供更多的资源前往场地。在本文中,我们讨论了挑战,三个获胜团队使用的方法以及学到的教训以指导未来的研究和竞争。