XiaoMi-AI文件搜索系统
World File Search System大满贯
经济学(BA或BS)
经济学的课程工作为各种职业目标服务。经济学专业(补充了严格的微积分和统计课程序列)是为经济学研究生工作做出的绝佳准备,这是学术,商业或政府就业的人。大满贯及其具有强大经济学培训的其他人是商业公司和政府机构以及商业或公共政策专业研究生学习的有吸引力的前景。经济学背景对于法律的研究和实践尤为理想。经济学学士学位建议对索取量化技能的专业感兴趣的学生进行。 B.S. 特别建议考虑经济学或其他定量领域的研究生院的荣誉学生和学生。。B.S.特别建议考虑经济学或其他定量领域的研究生院的荣誉学生和学生。

机器人导航和基于SLAM的地图构造...
*通讯作者zihanli1997@gmail.com摘要:SLAM(同时本地化和映射)技术在机器人技术领域起着至关重要的作用,该领域通过实时定位,映射和路径计划实现了在不知名环境中机器人在不知名环境中的自主导航。本文首先介绍了SLAM技术的基本原理和工作流程,包括传感器数据融合,状态估计和地图构建。然后,通过比较和分析传统的栅格地图和视觉大满贯技术的地图构造方法,显示了不同地图表示的优点和缺点。最后,讨论了SLAM技术在物流,智能制造和其他领域的广泛应用,并将其未来的开发方向进行了研究。关键字:SLAM技术;地图构造;视觉大满贯;应用程序方案1。在迅速发展的机器人技术景观中,对自治的追求是至高无上的愿望。这项工作的核心是同时定位和映射(SLAM)技术,这是一个基石,旨在支撑即将来临的“机器人时代”的基础设施。本质上,SLAM体现了典型的过程,机器人在该过程中浏览了未知的领土,在实时实现了本地化,映射和路径计划。作为自动迁移率的症结,[1-4] SLAM解决了从点A点到B点引导机器人的复杂挑战,该任务是看似简单而又充满复杂性的任务。改善移动处理机器人应用的宽度和深度。2。在未知室内环境的范围内,SLAM成为创新的灯塔,使机器人能够构建周围环境的细致地图并自动导航。随着数十年来无情的研发,该行业为实现机器人的自主权奠定了一条途径,猛烈的技术处于最前沿,预示着自主移动机器人导航的新领域。目前,由SLAM Navigation技术支持的自动移动应用程序非常广泛,涵盖了许多领域,例如航空航天,军事,特殊运营,工业生产,智能运输,消费者娱乐等。[5]典型应用程序包括将SLAM自主导航技术应用于物流机器人,这可以确保机器人具有高度智能和强大的环境适应性,从而有效地提高了企业的物流效率并降低生产成本。SLAM导航具有强大的适应性,周围环境的变化对导航没有影响,[6]完全证明了车辆的灵活性和可扩展性,并且可以根据工作条件的要求来定制各种连接方案。SLAM技术完全依靠环境中的丰富自然特征来进行自主定位和导航。物流和仓储环境相对复杂,机器人需要完成更多工作,因此其位置信息将不断变化[7]。相关工作2.1 SLAM技术早期大满贯研究几乎全部使用LiDAR作为传感器,它具有高精度和相对成熟的解决方案的优势。SLAM技术可以完成机器人的自主定位,有效地跟踪和操作目标,实现自主路径计划和导航,自动避免障碍和其他操作,从而大大改善仓库系统的智能和自主权。[8]但是,缺点也很明显,例如昂贵,大容量,更少的信息
Brujah Deck-策略指南
在战斗中做什么给对手造成尽可能多的伤害,以便他们空虚。确定范围之前:播放撕裂路标,以增加其余战斗的强度。操纵:您真的希望每一轮战斗的范围都接近,因为您的罢工仅在该距离上有效。因此,如果对立的奴才对远距离进行操作,则可以通过追击或大满贯进行近距离操作。不朽的抓斗:当在战斗中与吸血鬼打击时,您想发送到Torpor,玩不朽的抓斗,以免击打:战斗或罢工:躲闪或使用武器,然后罢工,然后造成比对方吸血鬼有血液更大的伤害。其他罢工:如果您对反对派的第一次罢工造成的损害不足以使它们送往Torpor(或者在对方盟友的情况下燃烧它们),请通过较高的追击或敏捷性来获得额外的打击,并使用它再次与:在Potence

机器人俱乐部Toulon团队描述2024
由于实现了Yolo V7 Tiny的对象检测技术,因此该方法利用AI相机在环境中检测固定和动态对象。随后,系统将这些检测与同时获得的2D激光雷达数据集成在一起,从而区分了对地图重建至关重要的静态结构,同时消除了瞬态元素或移动障碍物,从而滤除了不可靠的点云数据与临时或非静态项目。另一方面,LIDAR与Kalman过滤器结合使用,用于评估对象相对于机器人的距离和位置。这个策划的数据集应实现更准确的大满贯,从而使机器人可以区分永久地标和短暂的障碍。最后,开发的算法在整个室内设置中计算机器人的运动和相对定位。

仓库应用程序同时本地化和映射(SLAM)
COVID-19大流行对全球供应链的破坏性影响及其对本研究论文脆弱性的暴露,描述了为仓库应用实用的SLAM模型的开发和实施。SLAM技术允许自主系统在估计自己的位置的同时绘制未知环境。该模型将硬件(移动机器人平台与传感器)和软件(SLAM算法和实时数据处理)组合结合在一起。该项目涉及审查SLAM算法,组装硬件,开发软件模块并测试模型的性能。实验表明该模型成功映射了未知环境,并准确地估算了其实时位置。该项目对机器人技术,自动驾驶汽车和增强现实具有实际影响。总体而言,这项研究有助于大满贯技术的发展,并为该领域的进一步探索提供了见解。

3D狭窄空间映射技术的实验评估
关键词:大满贯,激光雷达,基于图像的映射,点云,狭窄空间,传感器评估摘要:狭窄的空间测量和映射对于许多应用而言非常重要,对数字3D模型的需求低 - 成本低成本,相对快速的方式增长。本文研究了用于室内映射的基于SLAM和基于图像的映射系统,并重点介绍了从两个商业映射系统Leica BLK2GO和MatterPort Pro2 Pro2 3D(MC250)获得的3D点云的比较。问题的问题包括映射轨迹对产生的映射结果的影响,以及狭窄空间测量中的映射传播误差的量。在实验上将两个系统与理想的几何目标设施和狭窄走廊的示例环境进行了比较。最后,通过派生指标给出结果,可以扩展到几个实际应用程序。
IAFS未成年人
ECON 3403国际经济和政策功能区域II II II ECON 3545环境经济功能区域II ECON 4413国际贸易功能区域II ECON II ECON 4545 ECON 4545环境经济功能区域IIIAFS 3000 INTL业务和管理功能区域INBU INBU INBU 3300 INBU 3300国际商业和商业(BUSS BUSSIANTIAL(BUSN)功能(BUSN)II II(BUSN)MAXIS II II(BUSN)MAFARIANT II&BUSN)II(350)大满贯)功能区II INBU 4200国际财务管理(仅限于商业(BUSN)专业)功能区II PSCI 3092比较政治经济学功能区II PSCI II PSCI 3213国际政治经济学(继续教育)职能区域II

优化方法在动态环境中改善视觉猛击
是针对一个问题,即经典视觉大满贯系统的鲁棒性受到环境中动态目标特征点的极大影响,提出了一种使用目标检测算法来识别和消除动态目标特征点的方法。首先,使用目标检测算法yolov5识别收集的环境图像,然后选择周围环境。对象被识别为环境中的动态目标,然后将目标检测结果集成到视觉猛击前端的特征提取中,删除了提取图像特征点的动态目标部分的特征点,其余的静态特征点用于映射构造和定位,并在TUM DATA集合上进行测试。结果表明,在使用目标检测算法来消除动态特征点后,在高度动态的场景中,视觉SLAM系统的绝对轨迹误差的根平方误差将减少97.89%,从而有效提高了系统的定位准确性和鲁棒性。

伦敦LSE夏季
表明了课程是如何转移回IU的。请访问伦敦LSE暑期学校网站,以获取最新的课程。•学生应向ksabroad@indiana.edu询问商业信用。对于凯利(Kelley)大满贯,请直接联系凯利国际计划办公室,以获得特定于商业的等效性。•未分配的100级(-os 100)课程尚未由IUB部门评估。具有100范围等效的课程将用于毕业生的总体学分。但是,学生可以在出国留学之前或之后对该部门提交课程材料,以评估特定的学分。•如果将课程列为OS200/300/400,则该课程已由学术部门评估。与学术部保持联系,以确定课程如何满足学位要求。•有些课程可能携带先决条件;确保检查程序的网站以确定资格。
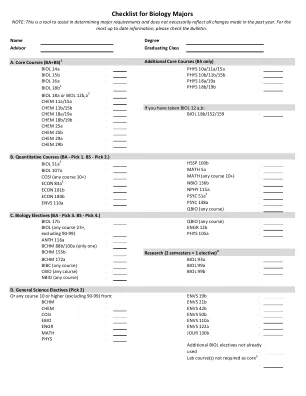
生物学专业的清单
1。在生物学专业的专业中,没有个体课程可以计入多个要求。2。Biol 18a,B仅限于生物学专业。如果您在服用非硕士生物学实验室系列(生物学12b和12a)之后,您将在另一个专业开始并切换到生物学专业,您将需要再添加一个4学分生物学实验室课程(例如Biol 18B,152或159),以完成专业的核心实验室需求。3。2020年秋季后入学的学生不能将Biol 51a,Econ 83a或Psyc 51a的学生用于大满贯。4。Biol 99的候选人必须在高年级的第一学期之前向部门请愿并提交论文。高级荣誉计划的候选人也必须口头捍卫论文。5。2个学分实验室课程算作一个选修课的一半。4学分实验室总体上数量。