XiaoMi-AI文件搜索系统
World File Search System定位
紧急定位发射器的 VLSI 设计方法...
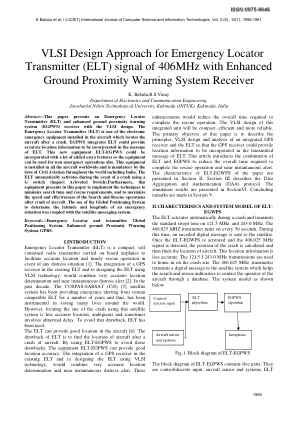
带有增强型近地警告系统接收器的 406MHz 紧急定位发射器 (ELT) 信号的 VLSI 设计方法 K. Babulu、R.S.Vinay 电子与通信工程系,尼赫鲁科技大学,卡基纳达 (JNTUK),印度 摘要---本文介绍了一种采用 VLSI 设计的紧急定位发射器 (ELT) 和增强型近地警告系统 (EGPWS) 接收器。紧急定位发射器 (ELT) 是安装在飞机上的电子应急设备之一,用于在飞机坠毁后定位飞机。集成 ELT 的 EGPWS 可以提供准确的位置信息以纳入 ELT 的消息中。这种新设备 ELT-EGPWS 可以结合许多附加的额外功能,因此该设备也可用于非紧急操作。这种设备安装在世界各地的所有飞机上,并且是包括印度在内的世界各地民航法强制要求的。发生坠机事故时,使用 G 开关(撞击激活开关),ELT 会自动激活。此外,本文介绍的该设备可实施相关技术,以尽量减少搜索时间和救援要求,并最大限度地提高飞机坠毁后搜索和救援行动的速度和效率。使用全球定位系统确定紧急情况的经纬度与卫星信息系统相结合。关键词— Eme

定位、导航的操作理解... - DTIC
估计此信息收集的公共报告负担平均为每份回应 1 小时,包括审查说明、搜索现有数据源、收集和维护所需数据以及完成和审查此信息收集的时间。请将有关此负担估计或此信息收集的任何其他方面的评论(包括减轻此负担的建议)发送至国防部华盛顿总部服务处信息运营和报告局 (0704-0188),1215 Jefferson Davis Highway, Suite 1204, Arlington, VA 22202-4302。受访者应注意,尽管法律有任何其他规定,但如果信息收集未显示当前有效的 OMB 控制编号,则任何人均不会因未遵守信息收集而受到任何处罚。请不要将您的表格寄回上述地址。1. 报告日期 (DD-MM-YYYY) 27 05 2021

对爆炸物相关威胁的认识和定位...
国土安全部 (DHS) 爆炸物检测、缓解和响应卓越中心,也称为 ALERT(爆炸物相关威胁意识和定位),开展转型研究,开发先进技术,并教育学生和从业人员有效地表征、检测、缓解和应对国家和世界面临的爆炸物相关威胁。在努力实现这一目标的同时,安全至关重要。处理高能材料需要时刻保持警惕。本文档概述了 ALERT 安全计划的组成部分:安全审查委员会、安全意识教育计划、安全协议和标准操作程序以及安全合规保证计划。我们希望通过花时间创建和审查这些安全操作程序,从业人员将提高对危险的认识并采取适当的护理。

新闻发布Bertrandt为未来定位
为了保持竞争力,该小组正在更广泛和国际上定位自己的产品组合,从而适应不断变化的市场状况和客户需求。Bertrandt通过在夏季已经宣布的收益优化计划来应对当前市场趋势,其中包括德国的结构和基础设施调整以及投资组合措施。在检查了各种重组方案并提前启动密集措施后,在所有部门中以800至1,200的顺序在德国进行裁员是不可避免的。其中一些已经在最近几个月实施。尤其是,Tappenbeck(沃尔夫斯堡附近)的Bertrandt网站现在受到了约600个工作的影响。Bertrandt认为,这些步骤将使它具有防前和竞争性,以便它可以继续对Megat趋势和客户需求进行灵活而快速的反应,并投资于重要的未来技术。作为全球工程服务提供商,跨国家边界的合作将大大增加。Bertrandt在2027年战略中尤其描述了全球交付的话题,并正在为进一步的国际定位提供可持续的工作。该小组在这里看到了进一步增长的好机会。在以下网址了解更多信息:www.bertrandt.com/en/

基于同步定位和地图绘制的自主导航系统
摘要 —本文介绍了基于同步定位和地图构建 (SLAM) 的自主导航系统的开发。本研究的动机是找到一种自主导航室内空间的解决方案。室内导航具有挑战性,因为它可以永远发展。解决这个问题对于许多服务来说都是必要的,例如清洁、医疗行业和制造业。本文的重点是描述为这个提议的自主系统开发的基于 SLAM 的软件架构。评估了该系统面向智能轮椅的潜在应用。当前的室内导航解决方案需要某种引导线,例如地板上的黑线。有了这个提议的解决方案,室内不需要翻新来适应这个解决方案。此应用程序的源代码已开源,因此可以重新用于类似的应用程序。此外,预计这个开源项目将由广泛的开源社区在其当前状态的基础上得到改进。索引术语 —深度学习、导航、物体避让、SLAM
量子保证定位、导航和授时
自 1978 年推出以来,美国全球定位系统 (GPS) 对军事能力产生了革命性影响。它使战场上的精确导航和机动成为可能,使精确制导武器得以发展,并提供了前所未有的协调和同步分布式部队的能力。对全球导航卫星系统 (GNSS) 的这种依赖已经延伸到民用和商业领域。

经典计算时代的多体定位
摘要 统计力学提供了一个框架,用于描述大型复杂多体系统的物理特性,仅使用几个宏观参数来确定系统的状态。对于孤立的量子多体系统,这种描述是通过本征态热化假设 (ETH) 实现的,该假设将热化、遍历性和量子混沌行为联系起来。然而,在强无序相互作用多体系统的动力学中,通过数值和实验发现的稳健多体局部化 (MBL) 机制,在有限的系统尺寸和演化时间下没有观察到热化趋势。虽然 MBL 机制的现象学已经确立,但核心问题仍未得到解答:在什么条件下 MBL 机制会产生 MBL 相,其中即使在无限系统尺寸和演化时间的渐近极限下也不会发生热化?本综述重点介绍了最近的数值研究,旨在阐明 MBL 相的状态,并确定了有关 MBL 相的关键未决问题。
使用磁力计和光传感器进行定位
第一种定位技术基于一个或多个磁力计测量磁性物体的感应磁场。这些测量取决于物体的位置和磁特征,可以用从电磁理论中得出的模型来描述。对于这项技术,已经分析了两种应用。第一个应用是交通监控,它对强大的定位系统有很高的需求。通过在车道附近部署一个或多个磁力计,可以检测和分类车辆。这些系统可用于安全目的,例如检测高速公路上的逆行驾驶员,以及通过监测交通流量用于统计目的。第二个应用是室内定位,其中移动磁力仪测量室内环境中磁结构引起的静止磁场。在这项工作中,提出并评估了此类磁环境的模型。

室内定位和4D MMWave成像雷达
状态估计是成功实施机器人系统的关键组成部分,依赖于相机,LIDAR和IMU等传感器。然而,在现实情况下,这些传感器的性能是通过具有挑战性的环境来划分的,例如不利的天气条件和弱光场景。新兴的4D成像雷达技术能够在不利条件下提供强大的感知。尽管有潜力,但对于嘈杂的雷达数据没有明确的几何特征而言,室内环境仍然存在挑战。此外,雷达数据分解和视野(FOV)的差异可能导致不准确的测量结果。虽然先前的研究探索了基于多普勒速度信息的雷达惯性探测仪,但由于FOV和雷达传感器的分辨率差异,估计3D运动的挑战仍然存在。在本文中,我们解决了多普勒速度测量不确定性。我们提出了一种在管理多普勒速度不确定性的同时优化车身速度的方法。基于我们的观察结果,我们提出了双成像雷达配置,以减轻雷达数据中差异的挑战。为了获得高精度3D状态估计,我们引入了一种策略,该策略将雷达数据与消费级IMU传感器无缝整合,并使用固定lag平滑光滑优化。最后,我们使用现实世界3D运动数据评估了我们的方法,并演示了本地化和映射的流任务。