XiaoMi-AI文件搜索系统
World File Search System导航系统

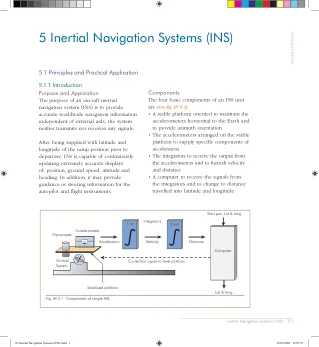
5 惯性导航系统 (INS) - Nordian
INS - 工作原理 INS 平台上的加速度计测量车辆在南北和东西平面的加速度。加速度信息随后在计算机中被积分两次,并与定时信号进行比较,以产生两个通道(南北和东西)的距离。平台通过陀螺仪稳定的万向系统和平台控制单元保持水平并与真北对齐。飞机轴和 INS 平台轴的相对位置提供有关飞机俯仰、滚转和航向的信息。

基于视觉的栖息飞机导航系统
摘要 本文介绍了使用位置传感二极管 (PSD)(一种光源方向传感器)设计基于视觉的栖息飞机导航系统的研究。飞机栖息机动模仿鸟类着陆,以低速或可忽略不计的冲击力爬升着陆。它们经过优化以减少其空间要求,例如高度增益或轨迹长度。由于干扰和不确定性,通过跟踪最佳轨迹实现实时栖息。由于控制器的性能取决于估计的飞机状态的准确性,因此建议在状态估计模型中使用 PSD 测量值作为观测值以实现精确着陆。通过数值模拟研究了该导航系统的性能和适用性。通过最小化轨迹长度来计算最佳栖息轨迹。加速度、角速率和 PSD 读数是根据该轨迹确定的,然后与实验获得的噪声相加以创建模拟传感器测量值。对最优着陆轨迹的初始状态进行扰动,通过假设零偏差,实现扩展卡尔曼滤波器进行飞机状态估计。结果表明,估计飞机状态与实际飞机状态之间的误差沿轨迹减小,从而验证了所提出的导航系统。

地月通信导航系统设想
对于无人月球探测,由于目前地面通信和定位支持对月球极地等特殊位置有限,需要增加覆盖范围和同时服务的用户数。•通信:月球探测四期和国际月球研究站都是针对月球极地地区,需要增加对月球南极的覆盖能力,支持频段包括X、Ka、UHF等。•定位:在国际月球研究站建设中,着陆器将密集地降落在同一区域。

庞巴迪挑战者 605 - 导航系统第 1 页
Honeywell Laseref V 微惯性参考系统 (IRS) 使用数字环形激光陀螺仪来计算姿态、航向、角速率、线性加速度、垂直速度和当前位置信息。IRS 与以下飞机系统接口:• 电子飞行仪表系统 (EFIS);• 气象雷达;• 自动飞行控制系统 (AFCS);• 飞行数据记录器 (FDR);• 地形感知警告系统 (TAWS);• 交通警报和防撞系统 (TCAS);• 失速保护系统 (SPS);• 飞机燃油系统;以及 • 飞行管理系统 (FMS)。

无线电导航系统飞行测试 - NATO STO
8.飞行检查程序 58 8.1 美国飞行检查 58 8.1.1 半自动飞行检查 (SAFI) 59 8.1.2 自动飞行检查系统 (AFIS) 60 8.2 欧洲飞行检查 60 8.2.1 法国飞行检查 60 8.2.2 英国飞行检查 61 8.2.3 荷兰飞行检查 61 8.2.4 德国飞行检查 62
卫星导航系统服务国际竞赛
本论文由 ODU Digital Commons 的国际研究研究生课程免费开放给您。它已被 ODU Digital Commons 的授权管理员接受并纳入国际研究研究生课程论文和学位论文。欲了解更多信息,请联系 digitalcommons@odu.edu 。

量身定制的混合导航系统... - 国际民航组织
关键推动因素。定制进场概念利用机载能力与地面自动化相结合,计算下降轨迹,基于对下降阶段可能遇到的所有已知 ATC 限制的了解,从而解决了这些低效率问题。ATC 在飞机到达目的地之前协调并上传航路许可,其中包括任何速度和高度要求以及替代低空雷达引导所需的任何路径调整。航路许可旨在为飞机的 FMC 提供满足特定航班时间和分离需求的手段,同时允许飞机遵循最佳下降轨迹。地面自动化,例如泰雷兹提供的 ATM 系统或美国国家航空航天局 (NASA) 开发的航路下降顾问 (EDA),可根据复杂的交通限制和空域限制计算出省油的下降解决方案。它构建了一个定制的到达方式,以适应飞机性能限制、标准仪表到达(STAR)限制、调度和排序要求、中间交叉限制和战略
爱因斯坦相对论的实际应用 – GPS 导航系统……
我们不需要知道它是如何工作的,只需要看看我们的 GPS - 虽然你可能经历过偏远地区 GPS 失灵的情况。全球定位系统 (GPS) 是一个由卫星和接收设备组成的网络,用来确定地球上某物的位置,例如你的手机。今天的 GPS 接收器非常精确,它们可以将其位置 (纬度、经度和高度) 精确到厘米。它于 1973 年发明,最初仅供美国军方使用。GPS 设备记录它从每颗卫星接收到这些信息的准确时间,然后评估每个信号到达所需的时间。初步估计,通过将经过的时间乘以光速,它可以计算出它与每颗卫星的距离,比较这些距离并计算出它自己的位置。