XiaoMi-AI文件搜索系统
World File Search System导航
导航糖尿病
•用肥皂和水洗手,用干净的毛巾干燥。•将新的柳叶刀装入衬里装置。•将测试条放入仪表中。确保条带不过时,它们是仪表的正确条,并且仪表已编码以匹配条带(如果适用)。•获取您的血液样本,并根据制造商的说明将血液涂在测试条上。•在葡萄糖日志中记录结果。•根据您的当地和州医疗废物指南处置柳叶刀。•如果您需要更多帮助,请参考所有者手册或联系电表的免费客户服务号码。该电话号码通常可以在仪表的背面找到。代表通常每周7天每天24小时可用。•在葡萄糖水平稳定时(例如在饭前和进餐后两个小时)时,可以选择在体内的另一个位置检查葡萄糖,称为替代现场测试。葡萄糖水平预计在某些情况下会迅速变化,因此不建议另类的现场测试:•当葡萄糖水平迅速上升时,例如在进餐后的两个小时内或生病时•当葡萄糖水平迅速下降时,例如胰岛素迅速下降,例如胰岛素的“峰值”活动(快速,短暂的,又是偶然的胰岛素),在锻炼之后(在锻炼之后)(又一次)(在锻炼之后)(在锻炼之后)(在锻炼中)

自主导航和...
I.引言带有障碍物检测的自动平衡线遵循机器人是一种高级自主设备,它可以整合路径跟踪,稳定性控制和避免障碍物功能。它利用红外传感器识别并遵循路径,该路径可以是白色表面上的黑线或黑色表面上的白色线,从而确保准确的导航。为了保持稳定性,机器人结合了陀螺仪和加速度计等传感器,即使在不规则的表面上也可以保持直立。以及线条跟踪和自动平衡,该机器人配备了使用超声传感器的障碍物检测机构。该传感器通过传输声波和解释返回的回声来计算机器人与任何对象之间的距离。障碍物检测功能可防止碰撞,从而使机器人更可靠和有效。但是,必须注意,由于其材料特性,超声传感器可能无法检测到某些对象,这可能不会有效地反映声波。机器人由Arduino Uno微控制器管理,该机器人控制器从红外传感器,稳定性传感器和超声波传感器中处理信息,以对运动,方向和平衡进行实时调整。这些功能使机器人非常适合诸如军事操作,交付系统,运输网络和帮助视力障碍的个人等应用。除了提到的功能外,自动平衡线跟踪机器人还包含高级控制算法,例如PID(比例构成 -
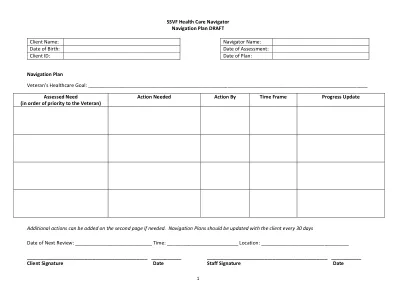
医疗保健导航员,导航计划草案
如果需要,可以在第二页上添加其他操作。Navigation Plans should be updated with the client every 30 days Date of Next Review: ____________________________ Time: __________________________ Location: ________________________________ ____________________________________________ ___________ ____________________________________________ ___________ Client Signature Date Staff Signature Date

空间通信与导航
频段 无线电业务 频段 无线电业务 401-403 MHz EESS (Es) 432-438 MHz eess(有源) 460-470 MHz [eess (sE)] 1215-1300 MHz EESS(有源) 1525-1535 MHz eess 3100-3300 MHz eess(有源) 1690-1710 MHz [eess (sE)] 5250-5570 MHz EESS(有源) 2025-2110 MHz EESS (Es) (ss) 8550-8650 MHz EESS(有源) 2200-2290 MHz EESS (sE) (ss) 9200-9800 MHz EESS(有源) 7190-7250 MHz EESS (Es) 9800-9900 MHz eess(有源) 8025-8400 MHz EESS (sE) 9900-10400 MHz EESS (有源) 13.75-14 GHz eess 13.25-13.75 GHz EESS (有源) 25.5-27 GHz EESS (sE) 17.2-17.3 GHz EESS (有源) 28.5-30 GHz eess (Es) 24.05-24.25 GHz eess (有源) 29.95-30 GHz eess (Es)(ss) 35.5-36 GHz EESS (有源) 37.5-40 GHz eess (sE) 78-79 GHz [EESS (有源)] 40-40.5 GHz EESS (Es) / eess (sE) 94-94.1 GHz EESS (有源) 65-66 GHz EESS 130-134 GHz EESS(有源)

导航AI
2,Lindenwood University https://orcid.org/0000-0002-0578-6052摘要:深神经网络(DNN)的可解释性和解释性在人工智能(AI)中至关重要,尤其是应用于医疗保健,财务,财务,财务,自然驾驶和自动驾驶和自动驾驶。这项研究的需求源于AI逐渐融合到关键领域,在这些领域中,透明,信任和道德决策至关重要。本文探讨了建筑设计选择对DNN解释性的影响,重点介绍了不同的建筑元素(例如层类型,网络深度,连接模式和注意机制)如何影响模型透明度。从方法论上讲,该研究对案例研究和实验结果进行了全面综述,以分析DNN中的性能与可解释性之间的平衡。它检查了现实世界中的应用程序,以证明医疗保健,金融和自动驾驶等领域的可解释性重要性。该研究还综述了实用工具,例如局部可解释的模型不合源说明(LIME)和Shapley添加说明(SHAP),以评估它们在增强模型透明度方面的有效性。结果强调了解释性有助于更好的决策,问责制和遵守监管标准。例如,在环境监测中使用Shap有助于政策制定者了解空气质量的关键动力,从而导致明智的干预措施。在教育中,石灰通过强调影响学生绩效的因素来帮助教育者个性化学习。研究结果还表明,结合注意机制和混合模型体系结构可以显着提高可解释性,而不会损害性能。关键字:解释性,解释性,深神经网络,AI透明度
导航-ai-security-for-copilot.pdf
最大化副驾驶的安全功能的一部分是确保将其集成到零信任框架中。零信任是基于每个用户会话的明确验证原则的企业安全策略,当时为用户提供最小网络和数据访问的访问权限,并假定违规姿势以最大程度地减少安全事件的影响。因此,重要的是要确保Copilot与这些原则以及您的企业如何实施它们保持一致。

明天导航:
该报告由Sylvain Cote领导并撰写。它的成功受益于各种各样的个人,他们的专业知识,专业精神和奉献精神是无价的。我对科学委员会成员表示感谢,包括人力资源与社会发展部副部长艾哈迈德·阿尔扎拉尼(Ahmed Alzahrani)博士;世界银行集团的Johannes Koettl博士,经济和社会研究所的Seamus McGuinness博士以及国际劳工组织的Peter Rademaker提供了关键的指导,从而塑造了该报告的早期方向。也感谢Takamol Holding和Richard Attias&Associates的支持。在结束时,我深表感谢,我反思了我撰写此报告的机会,我期待着继续参与全球推动劳动力市场的发展。
导航零
作为粮食和饮料行业的成员,至关重要的是,我们要采取积极的步骤来减少碳足迹,并为全球侵害气候变化做出贡献。通过接受可持续的实践,投资可再生能源以及支持促进环境管理的计划,我们可以在减轻气候变化的影响以及确保未来一代的可持续未来方面发挥至关重要的作用。了解排放和净零净的语言对于推动苏格兰食品和饮料行业的真正变化至关重要。通过了解和理解这些关键术语,您可以更好地进行对话,解释数据并为您的业务做出明智的可持续性决策。拥抱这一术语使我们有能力使用共享的词汇进行eo沟通,并更准确地衡量进度。最终,通过采用一种通用语言,我们可以在我们的净零旅程中庆祝里程碑,以减少环境影响的道路。让我们一起前进,并掌握知识,以创造有意义的动量,并为后代创造一个可持续的未来。Iain Clunie计划总监netzero@fdfscotland.orgIain Clunie计划总监netzero@fdfscotland.org