XiaoMi-AI文件搜索系统
World File Search System工程学
M.Tech。计算机科学与工程学
27 de abr。de 2024 - 农业中的非热等离子体应用。siitgoa004a。siitgoa005a ...主题/生物技术/生物学。获得CGPA学士学位。 7.5和... 的知识获得CGPA学士学位。7.5和...

B. Tech。材料科学与工程学的...
标题:下一代机器人应用程序的5G和基础AI模型演讲者:Bharadwaj Amrutur摘要:生成性AI,尤其是大型语言模型,以及5G的5G有望令人兴奋的新工具,以开发下一代机器人技术应用程序,以使我们的社会受益。示例包括服务机器人,以协助老年人进行日常活动,机器人团队以履行仓库中的订单等。然而,在非结构化环境中,与人类共同居住的安全有效操作的要求仍然是一个遥不可及的目标。我们认为,通过人类运营商的监督,智能电视操作以及托管AI的边缘/云可能会为实现近期部署提供途径。这样的机器人将需要了解语言和手势,并从现场获取其他非语言提示来提供有效的服务。在这次演讲中,我们将概述我们正在进行的努力在手势识别,语言条件的动作和启用网络的感知方面实现这一目标,以及我们开发的定制工具,以共同模拟网络和机器人(Cornet)。
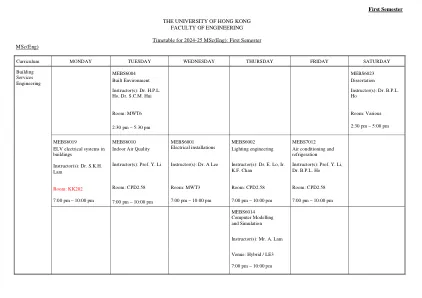
2024-25 学年理学硕士(工程学)课程时间表:第一学期理学硕士(工程学)
ELEC7023 (子类 J) 顶点课程研讨会(数据分析和人工智能应用): 讲师:AHC Wu 博士 2024 年 10 月 15 日下午 2 点至 5 点在 CPD-2.19;2024 年 10 月 16 日下午 2 点至 5 点在 LE3;2024 年 10 月 17 日上午 10 点至下午 1 点和下午 2 点至 5 点在 LE3;2024 年 10 月 18 日上午 10 点至下午 1 点和下午 2 点至 5 点在 LE3 ELEC7023 (子类 K) 顶点课程研讨会(嵌入式系统): 讲师:SC Chan 教授 2024 年 10 月 14 日下午 2 点至 5 点和晚上 7 点至 10 点在 CB-LG205;2024 年 10 月 15 日晚上 7 点至2024 年 10 月 16 日下午 2 点至 5 点,CB-LG205;2024 年 10 月 18 日下午 2 点至 5 点和晚上 7 点至 10 点,CB-LG205
神经人体工程学:大脑在工作
在神经工效学这一新兴领域,研究和开发工作日益增多。本书首次将这些知识汇集到一本。在编写本书时,我们试图展示如何通过对大脑功能的理解来设计安全、高效和愉快的工作。《神经工效学:工作中的大脑》展示了神经工效学如何以现代神经科学和人为因素心理学和工程学为基础,以增强我们对大脑功能和日常生活中复杂任务行为的理解,这些评估是在标准研究实验室范围之外的自然和自然环境中进行的。本书首先概述了神经工效学的关键问题,最后展望了这一新跨学科领域的未来。22 个中间章节涵盖了特定主题。主题范围广泛,涉及科学和临床方法,以解决有关大脑和行为的难题,这些问题继续推动我们的研究和寻找解决方案。这篇文章需要对医学、人为因素工程、生理学、心理学、神经影像学、公共卫生政策和法律等各方面有见解的专家的参与。有效应对这些问题需要

手动操作阀门的人体工程学评估。
第三章:方法与程序 ................................................................................................ 61 3.1 实验设置 ................................................................................................................ 61 3.2 实验一 ................................................................................................................ 66 3.2.1 受试者 ................................................................................................................ 66 3.2.2 方法 ................................................................................................................ 68 3.2.3 程序 ................................................................................................................ 78 3.2.4 实验设计 ............................................................................................................. 79 3.3 实验二 ................................................................................................................ 84 3.3.1 受试者 ................................................................................................................ 84 3.3.2 方法 ................................................................................................................ 85 3.3.3 程序 ................................................................................................................ 87 3.3.4 实验设计 ........................................................................................................ 87
紧急服务人体工程学和健康
确保供水 ................................................................................................................................ 113 穿上/脱下消防和救援设备 ...................................................................................................... 114 佩戴自给式呼吸器 .............................................................................................................. 115 提起和携带工具和设备 ...................................................................................................... 115 操纵软管线 ...................................................................................................................... 116 强行进入 ............................................................................................................................. 117 突破和拉动天花板 ............................................................................................................. 118 通风 ...................................................................................................................................... 119 爬行 ...................................................................................................................................... 120 上下楼梯 ............................................................................................................................. 120 操纵梯子 ............................................................................................................................. 121 登上设备 ............................................................................................................................. 121 检修 ............................................................................................................................................. 121 穿越火场:滑倒、绊倒和坠落 ................................................................................................ 122 车站周边................................................................................................................ 123

使用时的人为因素和人体工程学考虑...
免责声明:本文件并非由加拿大国防部下属机构加拿大国防研究与发展编辑部出版,但将编入加拿大国防信息系统 (CANDIS),即国防科技文献的国家存储库。加拿大女王陛下(国防部)不作任何明示或暗示的陈述或保证,也不对本文件中包含的任何信息、产品、流程或材料的准确性、可靠性、完整性、时效性或实用性承担任何责任。本文件中的任何内容均不应被解释为对其中研究的任何工具、技术或流程的特定用途的认可。依赖或使用本文件中包含的任何信息、产品、流程或材料的风险由使用或依赖本文件的人自行承担。加拿大对于因使用或依赖本文件中包含的任何信息、产品、流程或材料而引起的或与之相关的任何损害或损失不承担任何责任。

认知人体工程学和安全的系统评价
➢ 认知人体工程学具有从航空到健康的广泛应用领域。 / 认知人体工程学具有从航空到医疗保健的广泛应用。 ➢ 认知人体工程学研究可分为 4 个主要类别和 13 个子类别。 / 认知人体工程学研究可分为 4 个主要类别和 13 个子类别。 ➢ 神经人体工程学和认知人体工程学有很多共同的属性。 / 神经人体工程学和认知人体工程学有许多共同的特征。目的:本研究的主要目的是揭示认知人体工程学 (CE) 的研究,确定总体趋势,展示文献的差距。 / 本研究的主要目的是考察认知人体工程学 (CE) 的研究,确定文献的总体趋势并揭示文献中的差距。

EEC 244 – 神经工程学简介
目标:神经工程学是新兴的领域,工程学、医学和神经科学在此领域携手合作,以产生创新研究和有效解决方案,解决中枢和周围神经系统的各种病理。这门团队授课的跨学科课程的统一目标是向学生介绍神经工程学的关键研究领域和工具,并采用 NIH 风格的提案写作练习将课程内容整合到潜在项目中。上课时间:每周二下午 1:10-3:00(讲座)和周四下午 1:10-2:00(讨论)上课地点:1062 Bainer Hall 先决条件:研究生学历(或讲师批准)讲师:教授。 Erkin Seker(ECE;记录讲师)、Mitchell Sutter(NPB)、Jochen Ditterich(NPB)、Weijian Yang(ECE)、Christina Kim(神经病学)、Audrey Fan(神经病学)、Zhaodan Kong(MAE)、Lee Miller(NPB)、Jonathon Schofield(MAE)、Sergey Stavisky(神经外科)、Wil Joiner(神经病学)、Carolynn Patten(物理医学与康复)、Mark Fedyk(神经伦理学)助教:Hyehyun Kim(hyhkim@ucdavis.edu)和Greg Girardi(gpgirardi@ucdavis.edu)办公时间:讨论会通常作为办公时间。有关课程管理的问题请联系 Seker 教授,有关其讲座和作业的具体问题请联系每位讲师。评分:字母;最终成绩将根据家庭作业(45%)、最终项目报告(40%)、录制的演示文稿(10%)和道德讨论(5%)来评定。家庭作业:每个模块都会有家庭作业,大约在截止日期前一周布置。提案开发:学生将被要求为一个项目(例如,设备、技术、计算)撰写一份小型提案,该项目涉及神经科学或神经生物学问题或临床需求。该提案将使用美国国立卫生研究院的提案结构或美国国家科学基金会研究生研究奖学金结构,并将被格式化为博士前奖学金申请的基础,从而培训学生掌握基本的提案写作技能。提案开发将分为单独的作业,并将在整个课程中进行。鼓励学生就此征求导师的意见,并与其他研究生讨论。导师和同学将审查提案。然后,学生将根据审阅者的意见撰写反驳意见,并相应地修改提案作为最终提案。演示:学生将被要求按照包括(意义、创新、方法和道德考虑)的结构来展示他们的提案。这些电梯式的演示将预先录制,以供课外同行评审。
