XiaoMi-AI文件搜索系统
World File Search System执行器
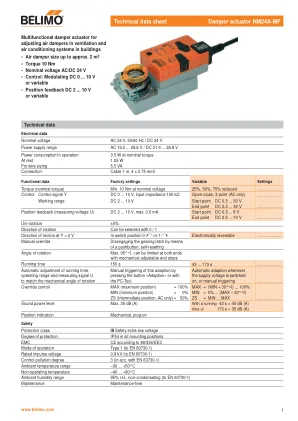
风门执行器 NM24A-MF 技术数据表
操作模式 执行器由 DC 0 ... 10 V 标准调制信号控制,并移动到控制信号定义的位置。测量电压 U 用于阻尼器位置 0 ... 100% 的电气显示,并作为其他执行器的从属控制信号。

风门执行器 GM24A-MF 技术数据表
操作模式 执行器由 DC 0 ... 10 V 的标准调制信号控制,并移动到控制信号定义的位置。测量电压 U 用于阻尼器位置 0 ... 100% 的电气显示,并作为其他执行器的从属控制信号。

您的电动执行器专家合作伙伴 - AUMA
自 1964 年 Werner Riester 和 Rudolf Dinse 创立公司以来,我们一直专注于开发、制造和销售电动执行器,以提供卓越的工程服务。凭借我们的开拓精神和对市场需求的清晰感知,我们已成长为全球技术领导者。我们的产品因其长寿命、可靠性和最高精度而受到客户的青睐。
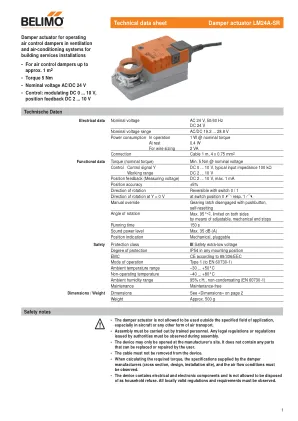
风门执行器 LM24A-SR 技术数据表
! • 不允许在指定应用领域之外使用阻尼器执行器,尤其是在飞机或任何其他形式的航空运输中。 • 组装必须由经过培训的人员进行。组装过程中必须遵守所有法律法规或当局颁布的规定。 • 只能在制造商现场打开设备。它不包含任何可由用户更换或维修的部件。 • 不得从设备上拆除电缆。 • 计算所需扭矩时,必须遵守阻尼器制造商提供的规格(横截面、设计、安装位置)和气流条件。 • 设备包含电气和电子元件,不得作为家庭垃圾处理。必须遵守所有当地有效的法规和要求。
适用于高性能应用的微型执行器
最初,一级方程式赛车允许使用复杂的软件控制 PAS 系统,具有多重冗余以确保安全。然而,2002 年,国际汽联的一项削减成本的举措禁止在动力转向中使用任何电子控制装置。车队首先研究了基于电动机的解决方案,但后来又恢复了“功率密度更高”的液压技术。在这项规则改变之后,车队尝试了各种液压机械方法,但这些方法比理想的要大,而且安装起来也很有挑战性。
Valtek 弹簧气缸线性执行器 - SIALCO
对于需要超高循环 (UHC) 寿命的应用,福斯提供 VL-UHC 系列执行器,该执行器具有超长的循环寿命。通过添加和修改标准 VL 系列执行器中使用的几个部件,VL-UHC 获得了以前认为无法实现的循环寿命。VL-UHC 执行器特别适合需要大量全行程循环的应用。
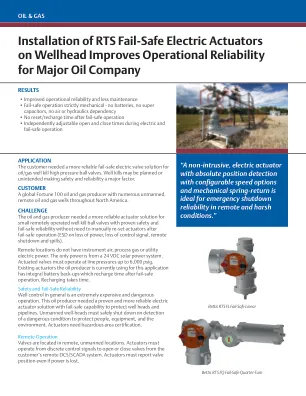
在井口安装 RTS 故障安全电动执行器...
本出版物的内容仅供参考,尽管我们已尽一切努力确保其准确性,但不应将其解释为对本文所述产品或服务或其使用或适用性的明示或暗示的保证或担保。所有销售均受我们的条款和条件的约束,这些条款和条件可根据要求提供。我们保留随时修改或改进我们产品的设计或规格的权利,恕不另行通知。

现场执行器和定位器紧凑型智能... - ABB
�������������������������������������������� � �������������������������� ��������������������������������������������������� �������������������������������������������� ���������������������������������������������� ����������� ���������������������������������������������� �������������������������������������� � ��������������������� �������������������������������������������������� ...���� � ���������������������� �������������������������������������������������� �������������������������������������������������������� �������������������������������������������������������� ��������������������������������������������������

采用液晶弹性体执行器的太阳跟踪装置
通过远离阳光的茎另一侧细胞的伸长来实现。水凝胶 [2] 和液晶弹性体 [3,4] 中也可以发现类似的响应光的可逆伸长和收缩机制,尽管使用水凝胶的系统通常具有非常长的响应时间,并且仅限于在水环境中发挥作用。30 多年来,液晶弹性体 (LCE) 一直处于研究和开发的前沿,部分原因是它们具有卓越的驱动特性 [5–7],也是因为它们独特的“软弹性”(产生机械应变时没有或只有非常低的弹性阻力)。[8] LCE 的线性驱动可以达到最大 500% 的应变 [9,10] 并且是完全可逆的:取向 LCE 样品的平衡长度直接反映内部向列有序的程度。从根本上讲,任何影响聚合物中向列相序的刺激都可引发 LCE 驱动,尽管热诱导相变是最自然的现象,但当加入光吸收剂 [3,4,11] 或磁性纳米粒子时,光和磁场等其他刺激也可引发顺序变化。[12] 这些特性使 LCE 成为从软机器人 [13] 到传感器 [14] 和智能纺织品 [15] 等实际应用中的有竞争力的材料。

用于卫星微推力器的压电执行器
在低压方面,集成在微推进器中的压电元件的选择基于其低功率要求、减小尺寸和质量、高冲程和低力。对于此类应用,多层弯曲执行器是首选,因为它们可以在小封装中提供快速而精确的运动。压电执行器的特性范围 两种执行器的特性需要适应相关应用的特定负载和操作条件。下面的比较表很好地说明了微推进器应用中压电执行器可以实现的广泛特性。