XiaoMi-AI文件搜索系统
World File Search System抓住的

审查机器人抓握的强化学习
摘要本评论论文对重点介绍了机器人握把的挑战以及各种机器学习技术的有效性,尤其是那些利用深神经网络(DNNS)(DNN)和增强学习(RL)的挑战的全面分析。这篇评论的目的是通过在一个地方收集不同形式的深入学习(DRL)掌握任务来简化他人的研究过程。通过对文献的彻底分析,该研究强调了对机器人抓住的批判性质,以及DRL技术(尤其是软性批评(SAC)策略)如何在处理任务方面表现出很高的效率。这项研究的结果对机器人的更先进和有效的握把系统具有重要意义。在该领域进行的持续研究对于进一步增强机器人在处理复杂和挑战性任务(例如抓地力)方面的能力至关重要。
地球经济分散和“连接器”国家
地球经济分散化 - 国际交易的现象越来越限于政治上的伙伴 - 为各个国家造成了风险,但也有机会通过成为“连接器”国家来抓住的机会。我们将联系的概念形式化为与来自整个意识形态范围中的国际合作伙伴交易的财产,并探索了连接性的各种政策相关性。我们表明,更开放和财务的国家往往是更加联系的国家。更高的关税(包括用于工业政策的关税)与联系较少有关。使用新的地球经济脆弱性和贸易和金融交易的地理经济联系的数据库,我们记录了自2016年以来的碎片化增加,伴随着脆弱性和连接性的广泛基础削减,尤其是出口和FDI。最大的削减是在最初是最脆弱的国家中发生的
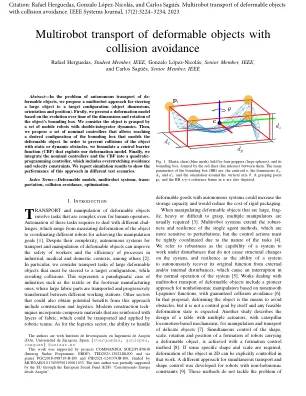
避免碰撞的可变形物体的多动物传输
摘要 - 在自动运输可塑造对象的问题中,我们提出了一种多机器人方法,将大对象转向目标配置(对象维度,方向和位置)。首先,我们基于对象边界框的尺寸和旋转时间的演化提出了一个变形模型。我们认为该对象是由一组带有双积体动力学的移动机器人抓住的。然后,我们提出了一组名义控制器,允许达到建模可变形对象的边界框的所需配置。为了防止对象与静态或动态障碍物的碰撞,我们制定了利用我们变形模型的控制屏障函数(CBF)。最后,我们将标称控制器和CBF集成到二次编程控制器中,其中包括过度拉伸的回避和速度约束。我们报告模拟结果,以显示在不同的测试方案中这种方法的性能。

聚焦 096 - Wordtrade
在经历了疫情和封锁的痛苦经历后,国家和个人都在寻找摆脱危机的方法,许多人希望尽快回到“疫情之前的世界”。但还有另一种方法可以吸取这次磨难的教训:作为地球的居民,我们可能终究无法如此轻易地摆脱封锁,因为全球卫生危机背后是另一场更大、更严重的危机——由新气候制度引发的危机。学会在封锁中生活可能是一个值得抓住的机会:为气候变化进行彩排,最终了解我们——地球的居民——生活在哪里,“地球”是什么样的地方,以及在未来几年我们将如何定位自己并存在于这个世界上。我们最终可能能够与所有其他生物一起探索我们生活的土地,开始了解我们正在经历的气候变异的真正本质,并发现什么样的自由是可能的——一种不同处境和不同理解的自由。
精神病心理健康护士(PMHNP)/ ... div>
这项研究是一项多中心的,梯级楔形试验,对急诊医疗服务(EMS)环境中儿科患者的癫痫发作的剂量剂量。它将每个参与的EMS机构在20个不同地点的时间安排随机,以从基于体重的剂量转换为标准化的,基于年龄的剂量,以便每个EMS代理商在这项5年的研究中从常规剂量转换为4年的招生期。主要结果是在通过Ceribell设备测量的ED到达时抓住的。将使用知情同意书(EFIC)程序的联邦例外进行入学。启动:2022年11月PI:Matthew Hansen,协调员:Nick Patrick Cannifuly:患者的年龄≥6个月至≤13岁,并且有辅助人员的癫痫发作,需要运输到任何医院; ceribell对患者的分位≥2岁。排除:患者具有苯二氮卓史过敏的先前史;或已知或假定怀孕;或根据护理人员的评估具有严重的生长限制。状态:注册;注册:101;所有站点总数:2,804联系人:cprem@ohsu.edu,24小时线:503-494-1777
北美防空司令部威慑、探测和击败任务的未来
需要北美防空司令部 (NORAD) 处理的数据呈指数级增长,所有迹象都表明这种趋势还将继续。由于对手能力的进步,这些增加的处理需求加上大大减少的决策空间,已经开始超出人类的能力。从感知威胁到采取决策的时间太短,不能继续像今天这样依赖人类进行处理。NORAD 面临的威胁现在完全有能力跨越曾经北美最强大的防御体系,即其四面环海的有利地理位置 1 。面对这些新出现的威胁,NORAD 必须调整和优化其感知能力。通过这样做,NORAD 将利用机会获得决策优势。全领域感知是 NORAD 必须抓住的机会,否则对手就会暴露 NORAD 老化能力的弱点。全域感知不仅为北美防空司令部提供了提高感知能力的机会,而且通过利用这些新的创新能力,它还为实现威慑、检测、击败的任务提供了更快、更高保真度的决策机会。在当今时间紧迫的高风险决策环境中,这一点尤为重要。引言 2.北美防空司令部作为一个双边司令部,保护了加拿大和美国
使用神经网络探索和解释生物大脑中运动处理的特性
视觉运动感知是从导航到深度感知和抓住的行为的基础。我们对生物系统的有限访问限制了我们对大脑中运动如何处理的理解。在这里,我们通过训练神经网络来估计图像序列的速度来探索生物系统中运动感知的特性。网络概括了生物学大脑中运动处理的关键特征,我们利用对其结构的访问来探索和理解运动(MIS)感知。我们发现,网络以方向捕获了对反平运动的生物学反应。我们进一步发现,由于反向运动与时空的接收界之间的相关性,它分别高估并低估了慢速和快速反向运动的速度,该相关性在相反的方向上调整为运动。第二,我们发现网络的V1和中间(MT)层中时空调谐特性的分布与在生物系统中观察到的分布相似。然后,我们证明,与调谐到快速速度的MT单元相比,调整为缓慢速度的单元主要接收到调谐到高空间频率和低时间频率的V1单元的输入。接下来,我们发现MT单元的模式运动和速度选择性之间存在正相关。最后,我们表明网络捕获了人类低相干运动刺激的低估,这是由于噪声和信号运动的汇集所致。这些发现为众所周知的现象提供了生物学上合理的解释,并为未来的心理物理和神经生理实验提供了混凝土预测。

安装在航天器上的冗余空间操纵器的双臂协调
摘要本文解决了轨道机器人机器人的服务和组装中的重要挑战,这是为了克服机器人关节上的力量/扭矩的饱和挫折,并在捕获后阶段中,同时与未控制的大型Angular和线性动力进行了目标飞船,同时控制目标航天器。作者提出了一种基于两个鲁棒和效果控制算法的新颖解决方案:最佳控制分配(OCA)和非线性模型预测性控制(NMPC)。这两种算法都旨在最大程度地减少关节扭矩,航天器执行器矩,接触力和复合冗余系统的矩,其中包括通过双n-数度空间机器人机器人操纵器抓住的常见有效载荷(目标航天器)安装在Chaser spacececraft上。OCA算法仅使用当前状态和系统动力学小型量化二次成本函数,但NMPC还考虑了未来状态估计值和对指定预测范围的控制输入。它在计算上更多地参与,但在减少关节扭矩方面提供了优异的结果。迄今为止,将MPC应用于机器人技术的文献主要集中在线性模型上,但双臂配位是高度非线性的,并且在双臂协调中没有MPC应用。提出的离散技术(非线性模型)具有优雅和简单性的确切实现(非线性模型),但仍考虑了双臂协调系统的完整非线性模型。它在计算上非常有效。计算机仿真结果表明,所提出的算法有效地工作,最小扭矩,接触力和矩实现。开发的算法在跟踪问题方面也非常有效。
乌干达
乌干达共和国在战略上位于东非,由于其丰富的自然资源,稳定的宏观经济环境以及迅速增长的4550万人口,提供了可赚钱的可再生能源投资机会,大约是北京人口的两倍(218.4万),并且预测指示到59400万,到203030年,> 2030年。123然而,北京的可再生能力为2181兆瓦,超过了乌干达的1222兆瓦。这意味着需要提出乌干达的可再生能源努力,以满足人口不断增长的电力需求。乌干达在非洲的第十三大经济中有一个强大的区域综合经济排名,而东非第三大,GDP为523.9亿美元。4农业在该国经济中起着很大的作用,因为它拥有约68%的人口,对其GDP贡献了25%,占出口收益的90%。However, its susceptibility to climate change and weather-related shocks has led the government to place great focus on other sectors such as the energy sector which is seen as a catalyst for achieving economic diversification and socio-economic goals which among others include achieving middle- income status and climate resilience by 2030.5在其发展计划中也证明了这一承诺,例如国家发展计划(NDP),以及乌干达的愿景2040,以及能源和矿产开发部门发展计划,这些计划涉及清晰的路线图,以将可持续的清洁电网访问增加80%和90%的可再生能源混合。6此外,乌干达的全国确定的贡献(NDC)还包括无条件的承诺,即通过成本效益,可再生能源促进和提高能源效率,到2030年降低了5.9%的排放量。7上述因素清楚地表明了乌干达对推进和投资其可再生能源部门的坚定承诺,这强调了中国投资者抓住的重要机会。