XiaoMi-AI文件搜索系统
World File Search System操作员

致力于 DIY - 处理厂操作员
研究表明,有些人害怕在公共场合讲话甚至超过害怕死亡。对于许多水和废水处理操作员来说,执照考试几乎会让他们产生这种焦虑。有些人会证实,他们可能对考试内容了如指掌,但却因为紧张而考试不及格。幸运的是,有办法克服考试焦虑,消除考试及格的障碍。以下是我从自己的经验和一些研究中总结出的一些技巧。紧张可以对你有利。我得到的最好的建议之一是一位大学辅导员在面试前给我打气。“如果你不紧张,”他说,“你就没有勇气。”当然,过于焦虑会伤害你,但过于随意也会伤害你。适当的紧张程度可以帮助你发挥出最佳水平。所以,接受更快的心跳和肾上腺素吧——让它们为你服务。做好准备——但不要太多。信心是焦虑的良药,而信心来自良好的准备。另一方面,在考试前一天晚上“临时抱佛脚”到凌晨并不是一个好主意。如果你坐在考场里时睡眠不足,你就不会发挥出最佳水平。坚持不懈地学习。当你知道自己准备好时参加考试。这样你就不会觉得非要临时抱佛脚。练习。在我大学毕业后的考试中,有一件事对我帮助很大,那就是回答练习题。你不仅要了解你的材料,还要知道问题的结构,这样你才能获得优势。不要喝咖啡。这有点像第一次驾驶驾照考试,考的是家里的车,而不是你以前从未开过的车。你可以在 Treatment Plant Operator 网站 www.tpomag.com/study 上找到水和废水考试的样题。考试时,你的身体和大脑会受到充分刺激 — 你不需要任何化学增强。喝很多咖啡,咖啡因的刺激可能会让你过于“兴奋”,无法正确专注于手头的任务。集中注意力。不要担心你周围房间里的其他人,他们好像什么都知道一样努力工作。对自己准备要有信心。集中精力回答问题。

NPMS 操作员标准手册 2017
49 CFR 195.59 (a) 和 49 CFR 192.727 (g) 设施废弃或停用中定义的废弃管道规定:“对于每个废弃的海上管道设施或每个跨越、穿过或穿过商业通航水道的废弃陆上管道设施,该设施的运营商必须在设施废弃时提交报告。” 提交 2000 年 10 月 10 日之后废弃的管道设施数据的首选方法是根据本文档中定义的标准向 NPMS 提交。除了 NPMS 要求的属性外,运营商还必须提交一封信,其中包含废弃日期、直径、废弃方法和证明,证明运营商尽其所知,所有合理可用的信息


课程注释:密度操作员
传统上,国家向量| ψ⟩表示量子系统的状态。但是,我们将需要一个更通用的对象来表示量子状态,以研究光结合相互作用。密度运算符以比状态向量更通用的方式代表量子系统的状态,并且等效地代表了观察者的系统知识状态。在开放系统的量子理论中使用密度运算符特别重要,在开放系统的量子理论中,量子系统与进化未知的外部系统以及测量和信息的量子理论相互作用。

对操作员计划的更新通知
注意:提供虚假信息或未能披露与授予或持有海事文件有关的信息是《海上运输法》第406条的罪行。在个人的情况下,该罪行的罚款是长达12个月的监禁或最高新西兰10,000 $ 10,000的罚款。

增生操作员的定量标准化
然后具有“近似曲线” .x t /将其收敛到t的固定点t!1。这是赖希(Reich)在1980年首次显示的[29],在这一结果十三年后,希尔伯特空间被Browder [3]和Halpern [11]独立证明了这一结果,在13年中,在任何L P空间中都不知道这种结果是不正确的。在最近的一篇论文[18]中,科伦巴赫和作者为上述结果提取了“ Metastabil的速率”,我们现在将详细说明这是我们的含义。该论文属于“证明挖掘”的研究计划,该计划旨在使用数学逻辑中的工具(解释性证明理论)分析主流数学的证明,以便提取可能立即明显的(有关更多详细信息,请参见[13]和最近的调查[15])。类似于上述收敛定理的此类附加内容自然是收敛速率,但是在这种情况下是反例(由于例如neumann [23])表明,即使在欧几里得空间中也无法存在可计算速率。在大多数情况下,在大多数情况下,在理论上的挖掘保证的理论结果 - “ Metatheorems”是可提取的,是上述的亚竞争速率 - 在Terence Tao [31,32]的意义上,该名称是由Jennifer Chayes建议的,这是詹妮弗·夏伊斯(Jennifer Chayes) - 这是n和div> n和div>
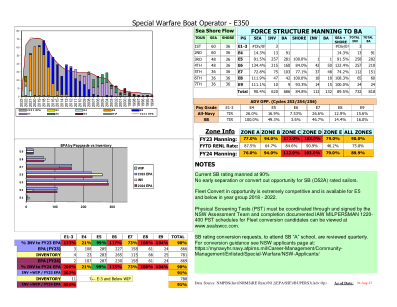
特种作战艇操作员 - E350
SB 等级转换申请(就读 SB“A”学校)每季度审核一次。有关转换指导,请参阅新南威尔士州申请人页面:https://mynavyhr.navy.afpims.mil/Career-Management/Community- Management/Enlisted/Special-Warfare/NSW-Applicants/
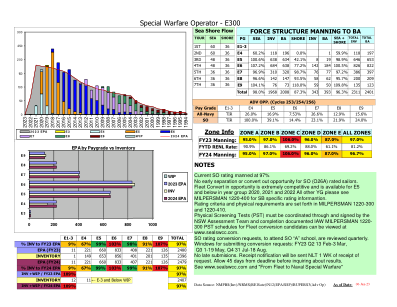
E300 - 特种作战操作员 - MyNavyHR
目前 SO 等级的人员配备为 97%。SO(O26A)等级水手没有提前分离或转换的机会。舰队转换机会极具竞争力,2020、2021 和 2022 年级的 E5 及以下人员可获得该机会。所有其他 YG 请参阅 MILPERSMAN 1220-400 了解 SB 特定的等级信息。等级标准和身体要求在 MILPERSMAN 1220-300 和 1220-410 中列出。体能筛选测试 (PST) 必须由新南威尔士州评估小组协调和签署,并记录完成情况。IAW MILPERSMAN 1220-300 舰队转换候选人的 PST 时间表可在 www.sealswcc.com 上查看。SO 等级转换申请(参加 SO“A”学校)每季度审核一次。提交转换请求的时间窗口:FY23 第二季度 2 月 13 日至 3 月 3 日,第三季度 5 月 1 日至 19 日,第四季度 7 月 31 日至 8 月 18 日。不接受迟交。收据通知将在收到请求后 1 周内发送。在查询结果之前,请留出截止日期后的 45 天时间。请参阅 www.sealswcc.com 和“从舰队到海军特种作战”