XiaoMi-AI文件搜索系统
World File Search System操纵器

农业机器人操纵器的角位移测量和控制传感器
摘要。本文描述了农业机器人,机器人操纵器的类型以及测量其旋转机制时出现的挑战。出现其出现的原因,在此过程中发生的物理和技术现象。分析了其测量所需的不同操作模式的测量换能器,并提出了这些传感器的主要要求。此外,本文提出了传感器,用于控制节能,智能机器人的旋转部分,用于采摘西红柿。这项研究的主要目标之一是衡量和控制用于农业中用于开发现代农业,节省能源和收获优质产品的农业的旋转部分的变化。这项研究的新颖性是机器人操纵器的旋转部分受到产品类型及其大小的控制。

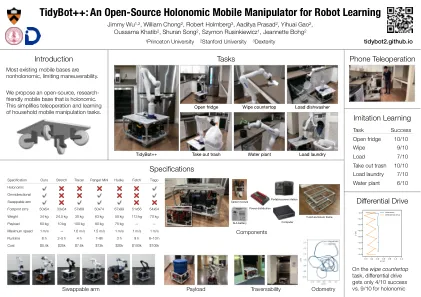
tidybot ++:机器人学习的开源自动移动操纵器
摘要:利用最近在模仿学习中进行操作的前进的承诺将需要收集大量的人类引导示范。本文提出了一种开源设计,用于廉价,健壮且灵活的移动操纵器,该设计可以支持任意武器,从而实现了各种各样的现实世界家庭移动操纵任务。至关重要的是,我们的设计使用动力施法者使移动基础能够完全自动,能够同时独立地控制所有平面自由度。此功能使基础更具机动性,并简化了许多移动操作任务,从而消除了在非实体基础中产生复杂且耗时的动作的运动限制。我们为机器人配备了直观的手机遥控接口,以实现简单的数据获取以进行模仿学习。在我们的实验中,我们使用此界面来收集数据,并表明所产生的学习政策可以成功执行各种常见的家庭移动操纵任务。


具有可变自主权的移动操纵器的迷你审查
本文介绍了具有不同自治水平的移动操纵器中当前研究状态的迷你审查,强调了它们相关的挑战和应用环境。在不同环境中需要移动操纵器,尤其是危险的操纵器,例如退役,搜救和救援,这是由于各种挑战和风险所面临的独特挑战和风险。在这些环境中部署的许多系统不是完全自主的,需要人类机器人的团队来确保在不确定性下安全可靠的操作。通过此分析,我们确定了有关可变自主权的文献中的差距和挑战,包括认知工作量和沟通延迟,并提出未来的方向,包括用于移动操纵者的全身自治,虚拟现实框架,大型语言模型,以减少操作员在某些挑战性和不确定方案中的复杂性和认知负载。


安装在航天器上的冗余空间操纵器的双臂协调
摘要本文解决了轨道机器人机器人的服务和组装中的重要挑战,这是为了克服机器人关节上的力量/扭矩的饱和挫折,并在捕获后阶段中,同时与未控制的大型Angular和线性动力进行了目标飞船,同时控制目标航天器。作者提出了一种基于两个鲁棒和效果控制算法的新颖解决方案:最佳控制分配(OCA)和非线性模型预测性控制(NMPC)。这两种算法都旨在最大程度地减少关节扭矩,航天器执行器矩,接触力和复合冗余系统的矩,其中包括通过双n-数度空间机器人机器人操纵器抓住的常见有效载荷(目标航天器)安装在Chaser spacececraft上。OCA算法仅使用当前状态和系统动力学小型量化二次成本函数,但NMPC还考虑了未来状态估计值和对指定预测范围的控制输入。它在计算上更多地参与,但在减少关节扭矩方面提供了优异的结果。迄今为止,将MPC应用于机器人技术的文献主要集中在线性模型上,但双臂配位是高度非线性的,并且在双臂协调中没有MPC应用。提出的离散技术(非线性模型)具有优雅和简单性的确切实现(非线性模型),但仍考虑了双臂协调系统的完整非线性模型。它在计算上非常有效。计算机仿真结果表明,所提出的算法有效地工作,最小扭矩,接触力和矩实现。开发的算法在跟踪问题方面也非常有效。
用于物理人体型操纵器合作的硬件式模拟器
摘要 - 本文介绍了与空中操纵器合作的硬件模拟器。模拟器为用户提供了适用于人冲水器交互活动的逼真的触觉反馈。测量硬件界面和Human/环境之间交换的力,并提供给动态模拟的空中操纵器。反过来,模拟的空中平台将其位置反馈到硬件,从而使人类能够感觉到并评估相互作用的效果。除了人冲洗操作器的合作外,模拟器还提供了发展和测试空中操纵中的自主控制策略。因此,对拟议系统的有效性以及两个案例研究进行了评估:一个协作任务,其中人类操作员将工具附加到机器人最终效用器和一个自动鸟分流器的安装任务。

强化学习控制可重构平面电缆驱动的平行操纵器*
摘要 - 由于电缆的固有灵活性和弹性,电缆驱动的并行机器人(CDPR)通常对模型和动态控制具有挑战性。将在线几何可重新配置性的附加包含在CDPR上导致具有高度非线性动力学的复杂不确定的系统。必要的(数值)冗余分辨率需要多个优化的层,以使其对实时控制的应用程序计算效率过高。在这里,深厚的强化学习方法可以提供一个无模型的框架来克服这些挑战,并可以提供实时的动态控制。本研究讨论了动态轨迹跟踪中无模型DRL实现的三个设置:(i)具有固定工作空间的标准非冗余CDPR; (ii)在可重构CDPR上具有冗余分辨率的端到端设置中; (iii)在一种脱钩的方法中,分别解决运动学和驱动裁员。

基于数值方法的动态补偿的航空操纵器机器人的多任务控制
本文提出了一种用于空中操纵器的控制方案,该方案允许解决不同的运动问题:最终效应器位置控制,最终效应器轨迹跟踪控制和路径遵循控制。该方案具有两个级联的控制器:i)第一个控制器是基于数值方法的最小范数控制器,它仅通过修改控制器引用就可以解决三个运动控制问题。另外,由于空中操纵器机器人是一个冗余系统,即,完成任务具有额外的自由度,可以按层次顺序设置其他控制目标。作为控制的次要目标,提议在任务过程中维持机器人臂的所需配置。ii)第二个级联控制器旨在补偿系统的动力学,其中主要目的是将速度误差驱动到零。提出了机器人系统的耦合动态模型(己谐和机器人臂)。该模型通常是根据力和扭矩的函数开发的。但是,在这项工作中,它是参考速度的函数,这些速度通常是这些车辆的参考。通过相应的稳定性和鲁棒性分析给出了提出的对照算法。最后,为了验证控制方案,在部分结构化的环境中进行实验测试,其空中操纵器与空中平台和3DOF机器人臂相符。