XiaoMi-AI文件搜索系统
World File Search System无人机系统
美国陆军无人机系统路线图 2010-2035
路线图为开发和将 UAS 功能集成到我们的编队中的进化方法提供了基础。路线图分为三个时间段:近期(2010-2015 年)、中期(2016-2025 年)和远期(2026-2035 年)。近期重点解决当今 UAS 能力的差距,同时强调快速集成现有技术以满足地面作战人员的当前需求。中期重点是将额外的多用途 UAS 集成到陆军作战的各个方面,从“网络”支持到“货运”能力。更远的未来重点是提高能力,同时减少尺寸、功率和重量要求。我们将每 2 年审查一次路线图,以保持与作战需求、经验教训和新兴技术的相关性。
英国空域的无人机系统运营
• 飞机的垂直距离(高度、海拔)以英尺(ft)表示 • 障碍物的高度以米(m)表示 • 导航、空域预留标绘和 ATC 分离的距离以海里(nm)表示 • 较短的距离以米(m)和千米(km)表示(当高度等于或超过 5000 米时) • 质量以千克(kg)和克(g)表示(当质量小于 1kg 时) • 速度以节(kt)表示 o 注意:低于 50kt 的速度也可以米/秒(m/s)表示


民用无人机系统 - 欧盟委员会
完全集成的解决方案不仅包括硬件(无人机),而且最重要的是服务(车辆、软件和飞行操作的选择)、数据采集和处理以及处理与机器性质相关的风险所需的保险服务。举个具体的例子,无人机在精准农业中的商业应用目前引起了农学家而非农民的兴趣。这是因为附加值在于数据的获取和处理。通过“飞行服务器网络”收集的数据对农学家更有价值,因为他们能够解释这些数据并根据这些信息提供建议。然而,在完全自动化的情况下,整个系统可以执行该过程的所有阶段:数据收集、解释和决策。
无人机系统 (UAS) 研究与教育...
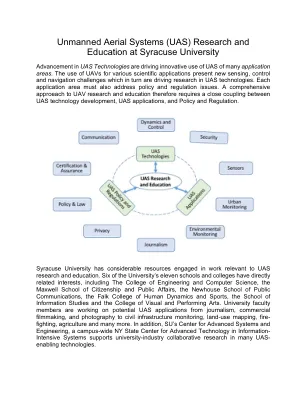
雪城大学拥有大量资源,从事与 UAS 研究和教育相关的工作。雪城大学 11 所学院中有 6 所与 UAS 有直接相关的研究兴趣,包括工程与计算机科学学院、麦克斯韦公民与公共事务学院、纽豪斯公共传播学院、福尔克人类动力学与运动学院、信息研究学院和视觉与表演艺术学院。雪城大学教职员工正在研究 UAS 的潜在应用,包括新闻、商业电影制作、摄影、民用基础设施监测、土地利用测绘、消防、农业等。此外,雪城大学的先进系统与工程中心是纽约州立大学校园范围内的信息密集型系统先进技术中心,支持许多 UAS 支持技术的大学与工业合作研究。
无人机系统智能群体技术
过去 25 年来,无人驾驶航空系统 (UAS) 或无人机技术(包括单个系统和 UAS 集群)得到了广泛应用。因此,随着该技术的不断成熟,这项技术以及使用这些 UAS 功能的能力既代表着当前的威胁,也代表着日益严重的威胁。在本次评估中,我们将无人机集群技术分为三类:(1) 由多个操作员协调的单个无人机群;(2) 已以协调方式编程为单独飞行、以领导者-跟随者配置飞行或以多无人机编队飞行(由人类操作员控制多架无人机)的无人机;(3) 可以在单个无人机之间进行通信并对外部刺激做出反应的智能无人机群。前两类代表了我们在本评估中所说的替代集群技术,而第三类被称为智能集群技术。1
NOAA 无人机系统 (UAS) 手册
NAS 内不符合 FAR 第 107 部分的航班可通过 FAA 颁发的 COA 获得批准,COA 包含具体规则和要求。FAA 会逐案批准 UAS 飞行操作的 COA。AOC UAS 部门是 FAA COA 申请的联系点,也是 FAA 在所有 UAS 事务上的联络人。申请包括但不限于运营计划、适航声明、空域要求、飞行员资格、无线电/通信频率、通信计划和平台详细信息。申请流程通过 FAA 在线系统进行。从 NOAA 提交 COA 申请之日起,FAA 至少需要 60 个工作日来处理 COA 申请。
NOAA 无人机系统 (UAS) 手册
NAS 内不符合 FAR 第 107 部分的航班可通过 FAA 颁发的 COA 获得批准,COA 包含具体规则和要求。FAA 会逐案批准 UAS 飞行操作的 COA。AOC UAS 部门是 FAA COA 申请的联系点,也是 FAA 在所有 UAS 事务上的联络人。申请包括但不限于运营计划、适航声明、空域要求、飞行员资格、无线电/通信频率、通信计划和平台详细信息。申请流程通过 FAA 在线系统进行。从 NOAA 提交 COA 申请之日起,FAA 至少需要 60 个工作日来处理 COA 申请。

无人机系统 (UAS) 第 1 组和第 2 组物理...
无人机系统 (UAS) 第 1 组和第 2 组体检工作表由合格的医疗服务提供者检查。任何不合格情况或“不合格”部分都需要在第 8 块中注明并由医疗官审查。向成员的指挥官 (CO) 提交豁免请求。参见 MANMED CH-15 第 IV 节
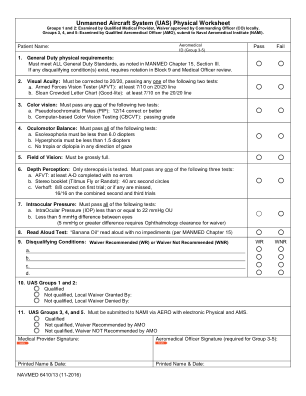
无人机系统 (UAS) 物理工作表
无人机系统 (UAS) 体检工作表第 1 组和第 2 组:由合格的医疗服务提供者检查,豁免由当地指挥官 (CO) 批准。第 3、4 和 5 组:由合格的航空医学官员 (AMO) 检查,提交给海军航空医学研究所 (NAMI)。