XiaoMi-AI文件搜索系统
World File Search System月球轨道

月球轨道卫星的法律问题...
月球资源开采一直是人们关注的焦点,而作为采矿先决条件的月球卫星却在很大程度上被忽视了。本文主要讨论国内外月球卫星的使用条件和监管情况。大体观点是,目前所有或几乎所有的国内和国际法规都不适用于月球卫星,或者只在最低限度上适用。因此,月球卫星目前的运行几乎没有指导、监管或限制。本文提出了几种解决监管真空的方法。第二部分提供了有关月球计划和月球卫星的背景信息,并指出监管不足可能会加剧月球利益相关者之间的冲突。第三部分展示了国际监管的不足,并提出了修改和解决方案。第四部分转向国内监管,并进行了分析,证明了

月球轨道测定的好处 基于月球的...
我们分析了将月球传感器测量结果与地月空间传感器在地月拉格朗日点 1 晕轨道上融合的轨道质量性能优势。假设了十几种传感器架构来量化跟踪不同系列地月目标的轨迹估计误差。我们使用了各种几何视角以及仅角度和距离测量。使用无迹卡尔曼滤波器处理度量观测值,底层动力学模型由圆形限制三体运动方程组成。整体轨道质量性能以惯性位置、速度和加速度估计误差的平均值和标准差来表示。结果表明,由四个中纬度窄视野仅角度观察者组成的月球传感器架构可以保持 100% 的轨道保管。对所有地月目标的平均位置 RSS 误差均低于 1 公里。我们发现,增加一个仅基于太空的角度观测者可将平均位置估计 RSS 误差降低五倍。总体而言,最佳架构性能组合包含基于月球和基于太空的角度和范围观测。
最终报告 - IG-24-011 - NASA 为 Artemis II 载人月球轨道任务做好准备
通过 Artemis 计划,NASA 打算让人类重返月球,并建立可持续的月球存在,为人类探索火星奠定基础。Artemis I 号无人驾驶试飞于 2022 年 12 月完成,这是 NASA 的一项重大成就,它提供了重要的数据和经验教训,这些经验教训来自硬件、软件、流程和团队的测试,将为 NASA 未来的 Artemis 任务做好准备。Artemis II 号载人试飞旨在让人类 50 多年来首次重返月球轨道,并将其四名机组人员送入比人类曾经去过的更远的太空。与 Artemis I 号一样,Artemis II 号任务将使用太空发射系统 (SLS),这是一种两级重型火箭,它将从肯尼迪航天中心的移动发射器 1 (ML-1) 将猎户座多用途载人飞船 (Orion) 太空舱发射到太空。到 2025 年 9 月(阿尔忒弥斯二号计划的发射日期),NASA 将在 SLS、猎户座和探索地面系统 (EGS) 项目上投入超过 550 亿美元。
太空机器人月球着陆器
Astrobotic 的着陆器可以将有效载荷送至月球轨道和月球表面。虽然轨道会因任务不同而变化,但 Peregrine 和 Griffin 通常保持在三个不同的月球轨道 (LO) 中,其中两个可用于部署有效载荷。近地点始终为 100 公里,而远地点则通过月球轨道插入 (LOI) 机动从 8700 公里减小到 100 公里的圆形轨道。轨道倾角通常由表面着陆点决定。

先进探索系统 (AES) 小型航天器任务
阿波罗计划是在阿波罗 15 号和阿波罗 16 号任务期间,当指令舱离开月球轨道时部署小型航天器。TRW 制造的粒子和场子卫星 (PFS) 系列旨在研究月球的等离子体、粒子和磁场环境以及绘制月球重力场图。
ShakthiSAT 任务申请表
家长同意:我,签名人,同意我的孩子 ___________________________________ 申请并(如果被选中)参加由 IGNITING HOPE 与 Space Kidz India 合作举办的 ShakthiSAT 任务。我了解该计划将涉及基于 STEM 的学习、在线课程,并且(如果我的孩子被选中)可能在 2026 年进行国际旅行,以便将太空有效载荷集成并发射到月球轨道。

月球上的印度 - 英语
Pragyan 被安置在 Vikram 着陆器内。Vikram 着陆后,Pragyan 将在月球表面推出。Chandrayaan-2 于 2019 年 8 月 19 日进入月球轨道。当轨道器模块仍在月球轨道上时,复合航天器于 2019 年 9 月 6 日释放了 Vikram 着陆器进行着陆。在约 2.1 公里的高度,它与地球地面站失去联系,Vikram 被认为已坠毁。虽然着陆器丢失,但轨道器仍在继续工作并发回月球表面的高清图像。

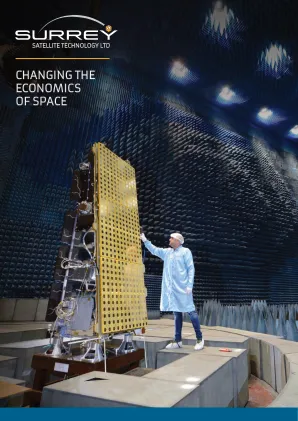
SLS 信息表 2021 年 12 月
美国宇航局设计了太空发射系统 (SLS),作为新一代人类深空探索任务的基础,包括月球和火星任务。SLS 将离开低地球轨道,将猎户座飞船、其宇航员和货物送入深空。为此,SLS 必须拥有足够的动力来执行称为月球外注入 (TLI) 的机动。此机动将使飞船从绕地球轨道加速到月球轨道。在一次任务中向月球发送更多质量的能力使探索变得更简单、更安全。