机构名称:
¥ 1.0
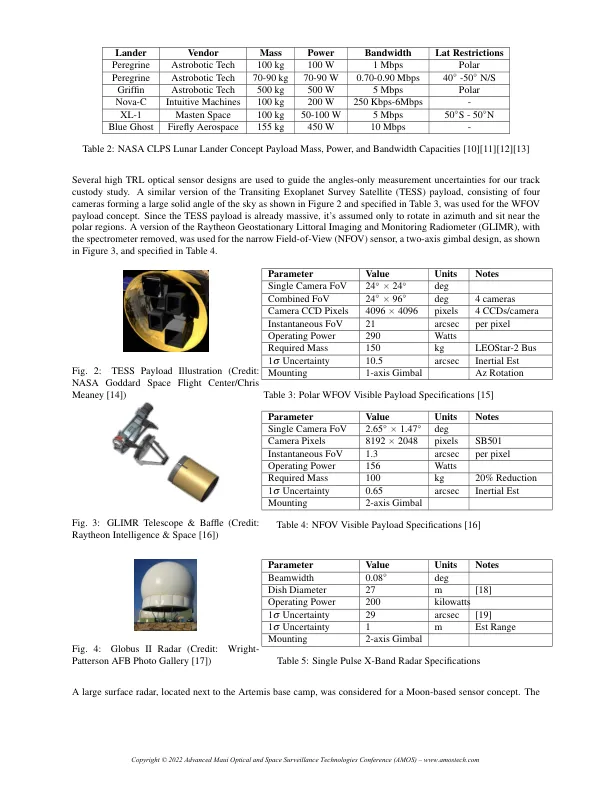
我们分析了将月球传感器测量结果与地月空间传感器在地月拉格朗日点 1 晕轨道上融合的轨道质量性能优势。假设了十几种传感器架构来量化跟踪不同系列地月目标的轨迹估计误差。我们使用了各种几何视角以及仅角度和距离测量。使用无迹卡尔曼滤波器处理度量观测值,底层动力学模型由圆形限制三体运动方程组成。整体轨道质量性能以惯性位置、速度和加速度估计误差的平均值和标准差来表示。结果表明,由四个中纬度窄视野仅角度观察者组成的月球传感器架构可以保持 100% 的轨道保管。对所有地月目标的平均位置 RSS 误差均低于 1 公里。我们发现,增加一个仅基于太空的角度观测者可将平均位置估计 RSS 误差降低五倍。总体而言,最佳架构性能组合包含基于月球和基于太空的角度和范围观测。
月球轨道测定的好处 基于月球的...
主要关键词




相关文件推荐