XiaoMi-AI文件搜索系统
World File Search System构造

简单构造 - 第二部分(可再生能源......
需要数字提交 坎贝尔市使用名为 MyGovernmentOnline(“MGO”)的在线许可系统。所有建筑许可申请均须通过 MGO 系统以电子方式提交,该系统可通过 https://bit.ly/buildingmgo 访问。在您首次提交申请之前,您必须创建一个用户帐户。欲了解更多信息,请访问城市申请中心 http://bit.ly/campbellappcenter 。如果您需要帮助创建用户帐户和/或浏览系统,MGO 还提供客户服务支持热线 (866) 957-3764。与本指南指定的申请提交要求相关的问题应直接发送给建筑检查部门,电话 (408) 866-2130 或 building@campbellca.gov 。如果您需要住宿,社区发展部有一个公共信息亭,您可以使用它通过 MGO 系统提交申请和/或创建用户帐户。但是,正如指南中进一步指出的那样,所有申请材料必须以电子形式提供;如果您希望使用公共信息亭,则必须将申请材料放在 USB 闪存驱动器上。出于安全原因,申请材料不得下载或通过电子邮件发送到信息亭计算机。

凶猛的生物技术名称构造治疗为“ ...
凶猛的生物技术将构造治疗命名为2021年波士顿的“凶猛15”生物技术公司之一 - 2021年9月27日 - 构造治疗今天宣布,凶猛的生物技术已将其命名为2021年凶猛的15个生物技术公司之一,将其指定为最有利的早期生物技术公司之一。“构造很高兴被以凶猛的15公司区分,认可了我们对新型GPCR靶向疗法的追求,”构造治疗总裁兼首席执行官Alise Reicin说。“在构造中,我们利用了学术创始人的开创性工作,并组建了一个行业专家团队,通过我们的Geode TM平台推进生物学方法,以满足重要的未满足的临床需求。我们期待在公司的这种变革时期内持续势头。” Tectonic的新方法有可能解锁GPCR的完整治疗效用。GCPR是人类生物学的核心,是所有批准药物中大约三分之一用于治疗多种疾病的靶标。然而,GPCR仍然是一个未开发的机会,因为许多受体仍未探索或不受小分子的困扰。不是使用小分子,而是使用其Geode™平台采用生物学方法,该方法旨在克服GPCR生物发现活动中迄今为止遇到的挑战。一种生物学方法将通过提高特异性和促进天然配体为肽或蛋白质的GPCR来解决主要挑战。“在2020年,我们必须庆祝试图从大流行中挖掘世界的最好,最聪明的生物技术。与今年的凶猛15名获奖者交谈表明,即使是全球大流行也无法阻止令人难以置信的医学创新,而且我们正处于一些新的突破性治疗,尽管去年持续了前所未有的破坏,但我们仍在持续发展,” Annalee Armstrong表示,Annalee Annalee Armstrong是Fierce Biotech的高级编辑。“放慢脚步是我们2021年凶猛的15个获胜者的选择。从探索基因疗法的一种新型病毒载体的生物技术到试图破解成纤维细胞的一种靶向抗肿瘤的一种方式,凶猛的生物技术团队听到了一件事,听到了一件事:科学家和专业人士的强大团队团结起来,以一个进步,以推动改变生命的药物。我们很荣幸能向世界展示这一尊敬的新兴生物技术。”凶猛的15庆祝“凶猛”的精神 - 即使面对激烈的竞争,也支持创新和创造力。这是凶猛的生物技术的第19届年度凶猛15选择。一份国际认可的每日报告,涉及30万多个生物技术和制药行业专业人士的网络,Fierce Biotech为订户提供了对当天的热门故事的权威分析。每年,凶猛的生物技术都会评估来自世界各地的数百家早期公司的年度凶猛15名榜单,该列表基于各种因素,例如其技术,合作伙伴关系,风险投资支持者和竞争性的市场地位。
现场单一构造系统的开发......
摘要:定点 RNA 编辑 (SDRE) 技术在治疗点突变引起的遗传疾病方面具有巨大潜力。我们小组和其他研究人员已经开发出利用作用于 RNA 的腺苷脱氨酶 (ADAR) 和引导 RNA 招募 ADAR 来靶向带有点突变的 RNA 的 SDRE 方法。一般来说,有效的 SDRE 依赖于引入相对于靶基因的大量引导 RNA。然而,对于基因治疗应用来说,实现较大的比例是不可能的。为了实现现实的比例,我们在此开发了一种系统,该系统可以使用由 ADAR 片段组成的融合蛋白和在单个构建体上包含每个基因一个拷贝的质粒载体将相等数量的基因和引导 RNA 引入培养细胞。我们将单个构建体转染到 HEK293T 细胞中并实现了相对较高的效率(高达 42%)。结果表明,当所有三个因素(靶基因、引导 RNA 和 ADAR 酶)的拷贝数相似时,可以实现有效的 SDRE。该方法有望在体内实现高效的基因修复,从而可应用于基因治疗。
构造目录2024 V1.CDR- siteworx
rla flexi flaster是一种快速干燥的自动化化合物,具有出色的流量特性,用于在新的或现有的内部混凝土和木材底物上缩小厚度为1至15mm的差异。它具有高水平的机械电阻,形成光滑,甚至表面,从而确保了地板覆盖物的随后安装。
pangenome图从基因组比对的构造
Pangenome参考文献通过存储一组代表性的单倍型及其对齐方式来解决参考基因组的偏见,通常是作为图形。由变体呼叫者确定的备用等位基因可用于构造pangenome图,但是长阅读测序的进步导致广泛可用的高质量的分阶段组件。直接从组件中构造pangenome图,而不是变体调用,它利用该图在不同尺度上表示变化的能力。在这里,我们介绍了直接从全基因组比对创建pangenomes的Mimigraph-Cactus pangenome管道,并证明了其从人类Pangenome参考联盟中扩展到90个人类单倍型的能力。该方法构建包含所有形式的遗传变异的图形,同时允许使用当前的映射和基因分型工具。我们衡量用于分析的参考基因组的质量和完整性的效果,并表明,使用端粒到三聚体联盟的CHM13参考可以提高我们方法的准确性。我们还展示了果蝇的构造Melanogaster Pangenome。
超级摇滚井设计和构造
地热能(“我们脚下的热量”)长期以来一直被誉为几乎无法取之不尽的大量基本电源来源(Tester等,2007),但在全球能量组合中仍然是可再生能源的利基提供者。最近,地热能提取已成为具有巨大潜力的重要清洁能源。这在很大程度上是由于最近从热,干岩(HDR)提取地热的概念的爆炸驱动的,克服了对稀有和地理上稀疏的水热资源的需求,并为“任何地方的地热”创造了希望。已经提出了几种概念来提取HDR的能量。宽松地,这些概念属于“增强(或工程)地热系统”(例如)的权限,尽管某些文献将诸如闭环地热系统(Beckers等,2022)和连接的多边系统(Holmes等,2021)(创建“热交所”(Heateanger Asshep As Sparted Geother)(ag as and Geotherm)(Hymes et and System)(Holmes et al,2021)分类(Beckers等,2022)。在这种情况下,经典EG是指一个概念,其中两个(或更多)井是通过资源中的断裂网络连接的。连接裂缝网络是通过液压压裂和/或水力剪切(在资源中重新激活现有的天然断裂)创建的。在配对井之间创建了连接的断裂网络后,就可以通过喷油器孔注入工作流体。流体流过资源中的连接网络,提取热量,然后通过配对生产商产生。Fervo(Norbeck等,2023)和犹他州Forge(Allis and Moore,2019年)的最新成功使EGS更接近现实。语义,自1970年代开始在芬顿山(Fenton Hill)开始以来,经典的EGS方法历史上一直受到最大的关注和资金(Brown等,2012)。这两个示范项目均处于200°C左右的温度下。最近,对这些成功在Superhot Rock(SHR)中的成功兴趣,资源温度超过375°C,已经蒸蒸日上,这证明了美国能源部关于下一代地热的商业升降机报告的最新途径(2024)。同时,创新在AGS地区继续进行,Eavor(Holmes等,2021)和XG(Moncarz和Suryanarayana,2022年)取得了进展。Khodayar和Björnsson(2024)对已实施或正在开发的各种常规(水热)和非常规(例如,AGS,地热存储)系统提供了出色的评论。
DTS 中的构造旅行简介
JTR 允许您使用您选择的交通方式,但它也赋予 AO 限制您的交通报销的权力。DTS 支持构建旅行,允许您在费用屏幕中展示您首选旅行方式的意图和成本,并让 AO 比较成本(例如,构建成本工作表 [CTW]、对 AO 的评论)并做出明智的决定(即,旅行者首选交通方式与政府首选交通方式)使用不同交通方式(例如,航空与 POV)以及其他因素(例如,时间、任务影响)进行同一次旅行并批准全额或有限报销。

机器人导航和基于SLAM的地图构造...
*通讯作者zihanli1997@gmail.com摘要:SLAM(同时本地化和映射)技术在机器人技术领域起着至关重要的作用,该领域通过实时定位,映射和路径计划实现了在不知名环境中机器人在不知名环境中的自主导航。本文首先介绍了SLAM技术的基本原理和工作流程,包括传感器数据融合,状态估计和地图构建。然后,通过比较和分析传统的栅格地图和视觉大满贯技术的地图构造方法,显示了不同地图表示的优点和缺点。最后,讨论了SLAM技术在物流,智能制造和其他领域的广泛应用,并将其未来的开发方向进行了研究。关键字:SLAM技术;地图构造;视觉大满贯;应用程序方案1。在迅速发展的机器人技术景观中,对自治的追求是至高无上的愿望。这项工作的核心是同时定位和映射(SLAM)技术,这是一个基石,旨在支撑即将来临的“机器人时代”的基础设施。本质上,SLAM体现了典型的过程,机器人在该过程中浏览了未知的领土,在实时实现了本地化,映射和路径计划。作为自动迁移率的症结,[1-4] SLAM解决了从点A点到B点引导机器人的复杂挑战,该任务是看似简单而又充满复杂性的任务。改善移动处理机器人应用的宽度和深度。2。在未知室内环境的范围内,SLAM成为创新的灯塔,使机器人能够构建周围环境的细致地图并自动导航。随着数十年来无情的研发,该行业为实现机器人的自主权奠定了一条途径,猛烈的技术处于最前沿,预示着自主移动机器人导航的新领域。目前,由SLAM Navigation技术支持的自动移动应用程序非常广泛,涵盖了许多领域,例如航空航天,军事,特殊运营,工业生产,智能运输,消费者娱乐等。[5]典型应用程序包括将SLAM自主导航技术应用于物流机器人,这可以确保机器人具有高度智能和强大的环境适应性,从而有效地提高了企业的物流效率并降低生产成本。SLAM导航具有强大的适应性,周围环境的变化对导航没有影响,[6]完全证明了车辆的灵活性和可扩展性,并且可以根据工作条件的要求来定制各种连接方案。SLAM技术完全依靠环境中的丰富自然特征来进行自主定位和导航。物流和仓储环境相对复杂,机器人需要完成更多工作,因此其位置信息将不断变化[7]。相关工作2.1 SLAM技术早期大满贯研究几乎全部使用LiDAR作为传感器,它具有高精度和相对成熟的解决方案的优势。SLAM技术可以完成机器人的自主定位,有效地跟踪和操作目标,实现自主路径计划和导航,自动避免障碍和其他操作,从而大大改善仓库系统的智能和自主权。[8]但是,缺点也很明显,例如昂贵,大容量,更少的信息
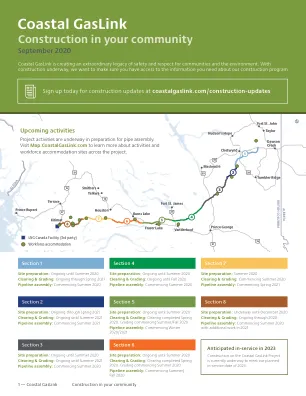
您的社区概况中的CGL构造
沿海加油机选择了四个主要承包商来构建管道 - Surerus Murphy合资企业,SA Energy Group,Macro Spiecapag合资企业和Pacific Atlantic Pipeline Construction Inc.我们还选择了AECON Group Inc.作为Pipeline的压缩机和仪表站的建设。在选择我们的主要承包商时,我们寻找了符合我们的安全,环境管理和与土著和当地社区的核心原则的高素质公司。
调频发射器和接收器的设计和构造...
认证................................................................................................................................................ii