XiaoMi-AI文件搜索系统
World File Search System检测算法
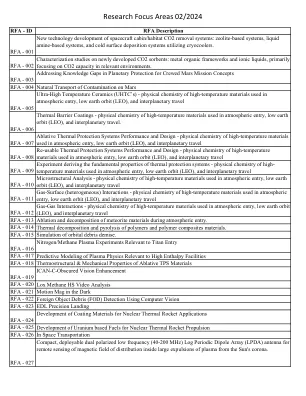
研究重点领域 02/2024
RFA - 115 摄影测量方法测量结构的动态运动并验证动态模型 RFA - 116 结构健康监测和损伤检测算法 RFA - 117 CO2 捕获 RFA - 118 CO2 去除 RFA - 119 CO2 利用 RFA - 120 CO2 转化为增值产品 RFA - 121 高比能电池(>250 Wh/kg),具有从 -60 到 +100 °C 的极端温度范围能力 RFA - 122 具有高比能(>250 Wh/kg)的高倍率电池(能够放电到 >20C) RFA - 123 用于微重力航天器舱环境的机组人员佩戴的约束装置和移动辅助设备 RFA - 124 与微重力和分数重力域兼容的机组人员宿舍内部结构 RFA - 125 通用栖息地建筑的维修、制造和加工 (RMAF) 设施 RFA - 126内陆水域浮游植物生物多样性(南非 - NASA BioSCape 项目)
![arxiv:2411.15497V2 [CS.CV] 2024年11月26日](/simg/8\811ad24cc1d5902e1721b00a4ab5775467ef340d.webp)
arxiv:2411.15497V2 [CS.CV] 2024年11月26日
遥感图像对象检测(RSIOD)旨在识别和定位卫星或空中图像中的特定对象。但是,当前RSIOD数据集中存在标记数据的稀缺性,这显着限制了当前检测算法的性能。尽管现有技术,例如数据增强和半监督学习,可以在某种程度上减轻这种稀缺性问题,但它们在很大程度上依赖于高质量的标签数据,并且在稀有对象类中的性能差。为了打扮这个问题,本文提出了一个布局控制的扩散生成模型(即燃气。据我们所知,Aerogen是第一个同时支持水平和旋转边界箱状况生成的模型,从而实现了满足特定外部外部和对象类别要求的高质量合成图像的构成。此外,我们提出了一个端到端数据增强框架,该框架集成了多样性条件的发电机和过滤器 -

人Dickkopf-3(DKK-3)在发育,免疫调节和癌症中的多面作用
对诱导的,特定于频率的神经活动的经典分析通常在试验中平均带限制功率。 最近,已广泛理解的是,在个别试验中,β频段活性是作为瞬态爆发而不是振幅调节的振荡而发生的。 大多数Beta爆发研究将它们视为单一,并具有刻板印象的波形。 但是,我们表明爆发形状各不相同。 使用爆发产生的生物物理模型,我们证明了波形可变性是通过产生β爆发的突触驱动器的可变性来预测的。 然后,我们使用一种新颖的自适应爆发检测算法来识别基于操纵杆的到达任务中记录的人类MEG传感器数据的爆发,并应用主成分分析以爆发波形来定义一组维度或图案,以最能解释波形方差。 最后,我们证明了特定范围的波形图案的突发,生物物理模型未完全解释的波形基序,差异化有助于运动相关的β动力学。 感觉运动β爆发不是均匀的事件,并且可能反映了不同的计算过程。对诱导的,特定于频率的神经活动的经典分析通常在试验中平均带限制功率。最近,已广泛理解的是,在个别试验中,β频段活性是作为瞬态爆发而不是振幅调节的振荡而发生的。大多数Beta爆发研究将它们视为单一,并具有刻板印象的波形。但是,我们表明爆发形状各不相同。使用爆发产生的生物物理模型,我们证明了波形可变性是通过产生β爆发的突触驱动器的可变性来预测的。然后,我们使用一种新颖的自适应爆发检测算法来识别基于操纵杆的到达任务中记录的人类MEG传感器数据的爆发,并应用主成分分析以爆发波形来定义一组维度或图案,以最能解释波形方差。最后,我们证明了特定范围的波形图案的突发,生物物理模型未完全解释的波形基序,差异化有助于运动相关的β动力学。感觉运动β爆发不是均匀的事件,并且可能反映了不同的计算过程。

设计用于逃避基于机器学习的硬件木马检测的人工智能木马
摘要 — 全球化的半导体供应链大大增加了片上系统 (SoC) 设计暴露于恶意植入物(俗称硬件木马)的风险。传统的基于模拟的验证不适合检测具有极其罕见触发条件的精心制作的硬件木马。虽然基于机器学习 (ML) 的木马检测方法因其可扩展性和检测准确性而很有前景,但基于 ML 的方法本身容易受到木马攻击。在本文中,我们提出了一种针对基于 ML 的木马检测算法的强大后门攻击,以证明这一严重漏洞。所提出的框架能够设计一个 AI 木马并将其植入 ML 模型中,该模型可以通过特定输入触发。实验结果表明,所提出的 AI 木马可以绕过最先进的防御算法。此外,我们的方法提供了一种快速且经济高效的解决方案,可实现 100% 的攻击成功率,其性能明显优于基于对抗性攻击的最先进的方法。

人工智能欺诈检测模型的数据隐私
无论使用哪种欺诈检测算法,它们都越来越受欢迎,因为它们能够利用大量个人数据、进行自动决策和创建配置文件。此类活动可提供竞争优势并影响商业活动。但是,根据 GDPR 第 22 条和第 35 条 [16],这些类型的处理活动需要额外的安全措施来保护 PII。由于不仅已识别人员的数据,而且可识别人员的数据都会受到影响,因此 GDPR 对此类活动提出了严格的要求。例如,在欺诈检测技术的设计和开发过程中,根据 GDPR 第 25 条 [16],设计和默认的数据保护要求企业以这样的方式设计解决方案,即在处理过程中的任何时间点,个人数据流都受到技术和组织措施 (TOM) 的保护,如表 1 所示。云解决方案的集成 - 无论是内部还是外部开发和/或托管 - 都必须额外保护静态和转换中的数据。
使用深度学习的道路车道线检测
摘要:道路车道线检测对于自动驾驶系统和高级驾驶员辅助系统(ADAS)至关重要。但是,在复杂的交通场景中,诸如阴影,公路模糊和稀疏标记之类的挑战阻碍了准确的检测和实时性能。该项目通过使用Python和OpenCV实施车道检测算法来解决这些问题。该算法通过预处理图像,采用颜色阈值和边缘检测等技术来增强检测,并利用Hough变换来实现车道边界标识。它提供了涵盖图像处理,计算机视觉和OPENCV的全面指南,以及克服挑战的策略。此外,它引入了一种多阶段算法,该算法结合了预处理,特征提取,实例分割,以进行精确的泳道描述以及后处理以进行精制结果。通过实验,这种方法证明了卓越的性能,确保了各种道路条件和环境之间可靠的车道检测,从而有助于自主驾驶技术的发展。

ISPRS 2019 年最佳论文!- RIEGL
每年,国际摄影测量与遥感学会 (ISPRS) 都会从《ISPRS 摄影测量与遥感杂志》的众多出版物中评选出年度最佳论文。2019 年,该奖项授予了科学文章《用于极浅水域激光雷达测深的全波表面和底部检测算法的设计和评估》,作者是 Roland Schwarz、Gottfried Mandlburger、Martin Pfennigbauer 和 Norbert Pfeifer。RIEGL 研究部的 Roland Schwarz 和 Martin Pfennigbauer 与维也纳科技大学和斯图加特大学合作,成功地利用他们文章中提出的 SVB 算法(表面、体积和底部)为水下地形测绘做出了新的创新贡献。他们的方法的一个显著优势是它只依赖于单一激光波长。陪审员对回报波形的详细建模、解释的清晰度、令人信服的实验结果以及该方法更广泛适用的潜力印象深刻。

使用支持向量机进行飞机飞行控制执行器故障检测
摘要:未来几代飞行控制系统,例如无人驾驶飞行器 (UAV) 的飞行控制系统,可能会更具适应性和智能性,以应对无人驾驶带来的额外安全性和可靠性要求。高效的故障检测和隔离 (FDI) 系统至关重要,应该能够监控飞机的健康状况。从历史上看,硬件冗余技术已用于检测故障。然而,由于成本高且附加组件质量大,在无人机中复制执行器并不理想。幸运的是,也可以使用分析冗余技术检测飞机执行器故障。在本研究中,设计了一种使用支持向量机 (SVM) 的数据驱动算法。所研究的飞机执行器故障是效率损失 (LOE) 故障。故障检测算法的目的是根据执行器的健康状况将特征向量数据分类为正常或故障类。结果表明,SVM 算法几乎可以立即检测到 LOE 故障,平均准确率为 99%。

使用阈值检测基于 EEG 的眨眼...
摘要 — 在脑电图 (EEG) 研究中,眨眼是一种常见的眼部伪影,在任何 EEG 测量中出现的频率最高。伪影可以看作是尖峰电位,其时频特性因人而异。它们的存在会对各种医学或科学研究产生负面影响,或在应用于脑机接口应用时有所帮助。因此,在本文中,检测眨眼信号有助于确定人脑和眼球运动之间的相关性。本文提出了一种简单、快速、自动化的眨眼检测算法,该算法执行前不需要用户培训。在眨眼检测之前,EEG 信号被平滑和滤波。我们对十名志愿者进行了实验,并使用 Emotiv EPOC+ 耳机在三次试验中收集了三个不同的眨眼数据集。所提出的方法表现一致,成功地检测到了眨眼的尖峰活动,平均准确率超过 96%。

深度学习的对象检测,智能轮椅医疗保健移动性的本地化和跟踪
摘要:本文介绍了智能电动轮椅的高级驾驶员援助系统(ADA)的开发,以提高残疾人的自主权。我们的用例基于正式的临床研究,基于轮椅室内环境中物体的检测,深度估计,定位和跟踪,即:门和门把手。这项工作的目的是为轮椅提供一个感知层,使以这种方式检测这些关键点在其直接周围的周围,并构建了短期寿命语义图。首先,我们将Yolov3对象检测算法的改编对我们的用例进行了改编。然后,我们使用Intel Realsense相机介绍我们的深度估计方法。最后,作为方法的第三步也是最后一步,我们根据排序算法介绍了3D对象跟踪方法。为了验证所有发展,我们在受控的室内环境中进行了不同的实验。使用我们自己的数据集对检测,距离估计和对象跟踪进行实验,其中包括门和门把手。