XiaoMi-AI文件搜索系统
World File Search System滤波器

SFG-G级级别的GF滤波器
Atlas Copco的流程过滤器在保护您的流程,产品和消费者的同时优化您的生产率。我们的墨盒和外壳组合涵盖了您的所有过滤需求。这些产品是由著名供应商的经过验证的高质量材料制成的,并在受严格质量检查/QC程序的受控环境中制造。

交叉耦合介电波导滤波器
配置,这对于集成应用程序很方便。此外,由于其高Q值和高功率能力,它们具有广泛的应用。在参考文献13中,设计了TM01模式单片介电滤波器,该滤光滤光片结合了使用带有低二电恒定恒定支撑的U形金属探针实现的负耦合。在参考文献14中,使用深层盲孔来基于介电波导结构实现负耦合。在参考文献15中分析了波导滤波器电容电容式负耦合理论。但是,这些类型的耦合需要高加工精度,并且需要一次成型,这不利于质量生产。这项研究涉及基于介电波导腔的一种正耦合结构的建议以及负耦合结构。该结构涉及一种集成的设计,可以通过简单地通过二线波导中的孔或盲孔来实现。在预期的位置钻孔或盲孔发射并模压滤波器的介电波导后,并且介电波导的表面完全金属化并同时涂层,这对于制造和调试非常方便。以四阶带通滤波器为例,本研究涉及一种介电波 - 导向器交叉耦合过滤器的设计。正耦合使用两个浅盲孔在对称的上方和下方的两个浅盲孔中,而中间通过一个连接两个盲孔的孔。负耦合是使用对称上方和下方的两个浅盲孔实现的。分析了正耦合设计理论,并阐明了过滤器的正向设计过程。制成的过滤器的总尺寸为27×27×5 mm,中心频率为3.5 GHz。带宽为5%,插入损失小于0.5 dB,带内的返回损耗大于15 dB,并且在3.25和3.65 GHz时产生了两个带外的传输零。

平面 x 射频滤波器系列
Planar X 标准低通滤波器利用薄膜工艺技术,在各种介电基板上使用,这些基板专为在恶劣环境中使用而设计。低通滤波器响应通带从 DC 延伸到指定的截止频率,此时滤波器过渡到阻带。带通滤波器的通带由中心频率和带宽定义。通带滤波器响应的阻带低于和高于通带频率。Planar X 体积小、重量轻且可表面贴装,可用于大批量拾取和放置应用,是卫星通信、雷达和广播行业的理想选择。Smiths Interconnect 还可以提供增值、高可靠性测试选项,为任务关键型国防和太空应用提供保障。

HEPA滤波器H14(对于G100)PDF
在处理有害物质(去除石棉,重金属,致癌灰尘,冷却润滑剂等)中苛刻的空调技术(手术室 /医院重症监护病房,实验室,洁净室等)< / div>在高度敏感的工业过程中(药学,生物技术,化学,光学,食品加工,微电子学等)作为Dectusting技术的下游警察过滤器

硅光子mems加载滤波器
引言硅光子学在过去几十年中已成为高性能光子集成电路(PIC)的成熟技术。标准化的硅光子技术平台受益于公认的制造工艺,基于CMOS Electronics Microfrication的体验,并助长了PIC设计师作为标准图书馆组件的大量高性能设备。中,基于光圈谐振器的附加电源过滤器已证明成功地在波长分层多路复用(WDM)电路中操纵光谱通道。标准硅光子平台中的主动加载过滤器通常会利用热形或等离子体分散效应。热控制的附加电源过滤器提供多种可调性(> 10 nm),但MS响应时间缓慢[1]。他们的高功耗和热串扰限制了可以集成在单个电路中的组件的数量。附加滤波器提供了NS响应时间,没有实质性的串扰[2]。然而,此类过滤器通常具有有限的调谐范围,并且由于组件的活性区域中的光子载体散射而导致过多的光学损失。最近,微机电系统(MEMS)技术已被认为是增强标准硅光子学的绝佳途径。好处包括低功率运行,大型指数可调性以及与标准硅光子平台制造过程的兼容性[3]。迄今为止,通过实现可移动的波导和环/磁盘谐振器[4] - [6]来实现硅光子磁极加载滤波器。尽管如此,此类先前的演示需要定制的光子技术。
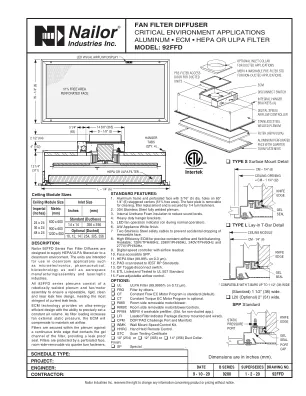
提交,型号92FFD,风扇滤波器扩散器 - 关键环境应用-Aluminum -ECM- HEPA或ULPA滤波器
描述:Nailor 92FFD系列风扇滤光器扩散器旨在为洁净室环境提供HEPA/ULPA过滤空气。这些单元旨在用于洁净室应用,例如微电子,制药,生物技术以及航空航天制造/组装和激光/光学工业。所有92FFD系列全体会议由机器人焊接的元素和风扇/电机组件组成,以确保可重复,刚性,清洁和近乎泄漏的设计,并符合当前最严格的泄漏测试。ECM技术提供了超能量的高效设计,具有精确设置恒定空气量的能力。随着滤波器加载会增加风扇外部静压,ECM将补偿以保持设定的气流。过滤器被固定在全体会议中,以接触过滤器的凝胶通道的连续刀边缘,从而提供防泄漏密封。过滤器受四分之一固定器的穿孔脸部可移动的脸部保护。

先进的 BAW 滤波器技术及其对 5G 的影响
5G 的全球推广和物联网的快速扩张带来了重大的全新 RF 滤波挑战。Qorvo 的体声波 (BAW) 滤波器技术正在不断进步,以克服这些挑战。主要进展包括:BAW 滤波器不断发展,以支持更高的频率和更大的带宽,以适应新的 5G 和 Wi-Fi 频段扩展。复杂的多滤波器模块(多路复用器和天线复用器)正用于解决 RF 系统挑战,尤其是 5G。此外,更小的 uBAW(微型 BAW)外形尺寸有助于将复杂的 RF 前端 (RFFE) 架构压缩到手机和物联网 (IoT) 设备有限的空间中。同时,Qorvo 的 BAW 技术有助于缓解与更高频率和更小外形尺寸相关的散热问题。
先进的 BAW 滤波器技术及其对 5G 的影响
5G 的全球推广和物联网的快速扩张带来了重大的全新 RF 滤波挑战。Qorvo 的体声波 (BAW) 滤波器技术正在不断进步,以克服这些挑战。主要进展包括:BAW 滤波器不断发展,以支持更高的频率和更大的带宽,以适应新的 5G 和 Wi-Fi 频段扩展。复杂的多滤波器模块(多路复用器和天线复用器)正用于解决 RF 系统挑战,尤其是 5G。此外,更小的 uBAW(微型 BAW)外形尺寸有助于将复杂的 RF 前端 (RFFE) 架构压缩到手机和物联网 (IoT) 设备有限的空间中。同时,Qorvo 的 BAW 技术有助于缓解与更高频率和更小外形尺寸相关的散热问题。

使用深的Kalman滤波器生成模型
基于变异自动编码器(VAE)的深层可变生成模型已显示出有希望的视听语音增强性能(AVSE)。基本的想法是学习干净的语音数据的基于VAE的视听先验分布,然后将其与统计噪声模型相结合,以从目标扬声器的嘈杂的音频录制和视频(LIP图像)中恢复语音signal。为AVSE开发的现有生成模型没有考虑到语音数据的顺序性质,从而阻止它们充分整合视觉数据的力量。在本文中,我们提出了一个视听深度卡尔曼滤波器(AV-DKF)生成模型,该模型假设了潜在变量的一阶马尔可夫链模型,并有效地融合了视听数据。此外,我们将一种有效的推理方法来估算测试时估计语音信号的方法。我们进行了一组实验,以比较语音增强的生成模型的不同变体。结果证明了AV-DKF模型的优越性,与仅音频版本以及基于Audio-Audio-forio-visual Vae模型相比。