XiaoMi-AI文件搜索系统
World File Search System理想平台

Kria K26 SOM:边缘 Vision AI 的理想平台
摘要 随着人工智能 (AI) 和机器学习 (ML) 算法的不断进步,许多高计算应用程序现在都部署在边缘设备上。因此,需要一种高效的硬件,既能高效执行复杂算法,又能适应这项技术的快速改进。Xilinx® Kria™ K26 SOM 旨在满足在边缘设备上高效执行 ML 应用程序的需求。在本白皮书中,研究了各种 ML 模型和实时应用程序的性能,并将其与 Nvidia Jetson Nano 和 Nvidia Jetson TX2 进行了比较。Xilinx 的结果显示,K26 SOM 的性能优势大约是 Nvidia Jetson Nano 的 3 倍。与 Nvidia Jetson TX2 相比,它的性能/瓦特优势也超过 2 倍。K26 SOM 的低延迟和高性能深度学习处理单元 (DPU) 比 Nano 提供了 4 倍或更大的优势,并且具有 SSD MobileNet-v1 等网络,使 Kria SOM 成为开发 ML 边缘应用程序的理想选择。
招股说明书 - 迪拜校园Pilani
BPDC是想要在世界上有形差异的学生的理想平台。我们的学院致力于提供全面的教育,该教育涵盖了最新的技术和该领域的最新进步。通过练习学校,我们为学生提供了7.5个月的行业经验,当前的市场就绪毕业生受到了行业的追捧!
算法设计挑战2024
关于事件:算法设计挑战2024是一项令人兴奋的竞争,其中参与者的任务是设计有效的算法来解决复杂的现实世界中的问题。此事件挑战竞争对手,通过在有限的时间范围内开发优化的解决方案来展示他们解决问题的技能,创造力和编码专业知识。这是创新者和程序员推动算法设计界限并展示其在该领域的精通范围的理想平台。

零售创新的强大,可靠和灵活的平台
同时,电子商务的持续增长还为零售商提供了有关消费者行为的宝库,他们可以用来提供个性化的体验和优惠。但是,要提供客户想要的无缝混合旅行和真正的个性化体验,零售商需要可扩展,可靠和安全的IT基础架构来支撑其运营。正如我们将在本文中解释的那样,IBM Power10是零售的理想平台,为保持大规模的商店网络和在线服务提供平稳运行以及支持下一代创新的灵活性提供了弹性。
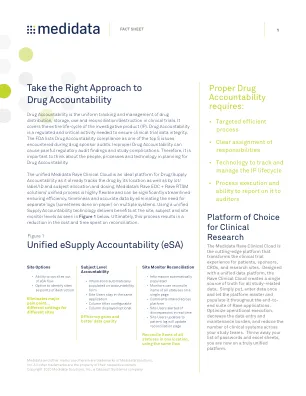
采取正确的药品责任制统一方法...
统一的 Medidata Rave Clinical Cloud 是药品/供应问责制的理想平台,因为它已经通过药品位置以及批次/标签/ID 和受试者分配和剂量来跟踪药品。Medidata 的 Rave EDC + Rave RTSM 解决方案的统一流程非常灵活,并且可以通过消除在多个系统上单独记录(有时在纸上完成)的需求来显著简化流程,从而确保效率、及时性和准确的数据。使用统一的供应问责制技术可在站点、受试者和站点监测器级别带来好处,如下图 1 所示。最终,此流程可减少对账的成本和时间。


胡椒和NAO机器人类人类和教育的未来
摘要:胡椒和NAO是通用和高性能的人形机器人,被证明是人机相互作用,认知计算和自动导航的理想平台。这些机器人在教育中特别有效,与儿童建立同情心,并促进身体,智力,社会和情感技能的发展。他们已成功地用于残疾学生的个性化教育计划,包括自闭症,增强儿童的社交和自尊心。除了它们的互动功能之外,胡椒和NAO都是全面的开发软件包,集成了计算机,相机,传感器和电动机,使它们成为可访问的教育和研究工具。通过其专门的硬件和软件,这些机器人充当支持教育环境中学习的自主媒介,参与复杂的主题并有效与学生和老师进行互动。

使用 Oracle Database 23ai 的 AI 矢量搜索和 Exadata X10M 增强 AI 应用程序开发
Exadata 的架构通过横向扩展配置、出色的内存带宽和智能存储解决方案支持 AI 向量搜索用例。这些功能增强了 AI 应用程序的性能和可扩展性。Exadata 的纵向扩展/横向扩展功能以及每插槽 96 个处理器核心的 AMD EPYC 处理器的使用支持复杂的 AI 操作和无缝可扩展性,使其成为企业 AI 应用程序的理想平台。Exadata X10M 平台具有极高的可扩展性,能够支持数千个 AMD EPYC 处理器核心和 PB 级存储,这意味着随着对利用其私有业务数据的数据密集型 GenAI 应用程序的需求不断增长,开发人员和 IT 组织都不必担心遇到性能障碍。

vlsi 幻想家俱乐部
VLSI 俱乐部是一个协作空间,学生可以在此学习超大规模集成设计的基础知识。它专注于由经验丰富的教师指导的实践项目,确保学生深入了解核心概念。定期举办的研讨会涵盖 VLSI 设计中的基本主题、工具和技术。学生以团队形式开展实际项目,培养团队合作精神和创造力。俱乐部营造了一种支持性的环境,会员可以向教师寻求指导和反馈。此外,它鼓励在项目开发中进行实验和创新。学生获得宝贵的经验,从而提高他们的学术学习水平。与同学和教师建立联系的机会有助于建立强大的社区。总体而言,俱乐部是学生发展技能和将知识应用于现实场景的理想平台。 俱乐部名称:VLSI Visionaries

通过可编程序序不稳定性实现软圆柱结构中的复杂变形
超弹性圆柱壳在加压下表现出的显著变形使其成为可编程充气结构的理想平台。如果施加负压,圆柱壳将弯曲,从而产生一系列丰富的变形模式,由于选择了超弹性材料,所有这些变形模式都可以完全恢复。虽然真空下的初始屈曲事件很容易理解,但这里探索了后屈曲状态,并确定了设计空间中发生耦合扭曲收缩变形模式的区域;通过仔细控制我们的均质壳的几何形状,可以控制收缩与扭曲的比例。此外,可以通过改变我们壳的圆周厚度来解锁作为后屈曲变形模式的弯曲。由于这些软壳可以从屈曲引起的显著变形中完全恢复,因此可以利用这些不稳定性驱动的变形来构建能够通过单个驱动输入进行可编程运动序列的软机器。