机构名称:
¥ 2.0
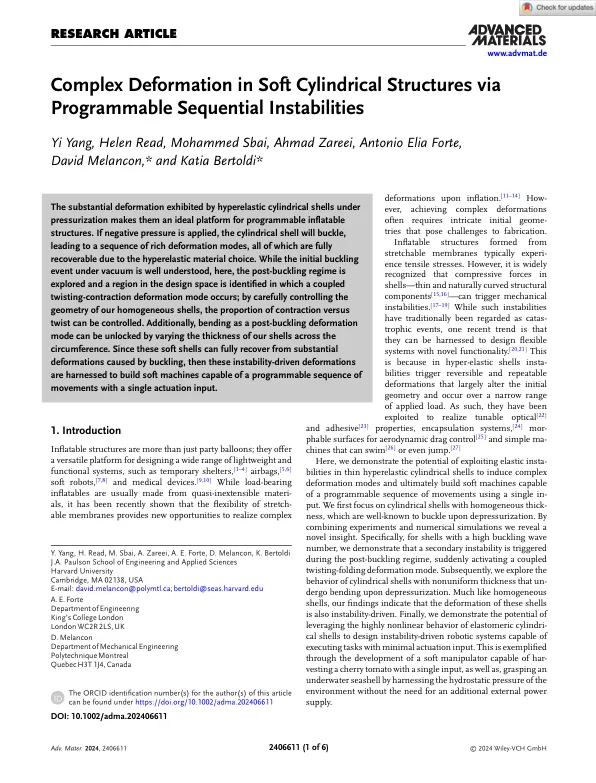
超弹性圆柱壳在加压下表现出的显著变形使其成为可编程充气结构的理想平台。如果施加负压,圆柱壳将弯曲,从而产生一系列丰富的变形模式,由于选择了超弹性材料,所有这些变形模式都可以完全恢复。虽然真空下的初始屈曲事件很容易理解,但这里探索了后屈曲状态,并确定了设计空间中发生耦合扭曲收缩变形模式的区域;通过仔细控制我们的均质壳的几何形状,可以控制收缩与扭曲的比例。此外,可以通过改变我们壳的圆周厚度来解锁作为后屈曲变形模式的弯曲。由于这些软壳可以从屈曲引起的显著变形中完全恢复,因此可以利用这些不稳定性驱动的变形来构建能够通过单个驱动输入进行可编程运动序列的软机器。
通过可编程序序不稳定性实现软圆柱结构中的复杂变形
主要关键词

相关文件推荐