XiaoMi-AI文件搜索系统
World File Search System直升机
索取有关海王直升机的信息 - GOV.UK
如果您对本函内容有任何疑问,请首先联系本办公室。如果您想投诉对您的请求的处理或此回复的内容,您可以通过联系信息权利合规团队(地址:Whitehall, SW1A 2HB,国防部主楼底层,电子邮箱:CIO-FOI-IR@mod.gov.uk)申请独立内部审查。请注意,任何内部审查请求都应在本回复之日起 40 个工作日内提出。
海军航空训练先进直升机负责人...
CNATRAINST 1542.156G N714 2023 年 7 月 20 日 CNATRA 指令 1542.156G 来自:海军航空训练局局长 主题:先进直升机多业务飞行员训练系统 1.目的。发布用于训练海军航空训练司令部飞行训练高级直升机阶段的学生海军飞行员的课程。 2.取消。当最后一名报名的学生完成课程时,CNATRAINST 1542.156F 将被取消。 3.行动。本课程自收到之日起生效。未经海军航空训练局局长 (CNATRA) 书面授权,不得进行任何更改。 4.记录管理。根据本指令创建的记录,无论媒体和格式如何,都必须按照 2019 年 9 月海军部长手册 5210.1 进行管理。 5.审查和生效日期。根据本指令 OPNAVINST 5215.17A,CNATRA N7 将在其生效日期周年纪念日左右每年审查本指令,以确保适用性、时效性以及与联邦、国防部、SECNAV 和海军政策和法定权力的一致性,使用 OPNAV 5215/40 指令审查。本指令有效期为 10 年,除非在此期间修订或取消,并且如果仍然需要,将在 10 周年纪念日之前重新发布,除非它符合 OPNAVINST 5215.17A 第 9 段中的一项例外情况。否则,如果不再需要该指令,则将按照 2016 年 5 月 OPNAV 手册 5215.1 中的指导,在得知需要取消后立即处理取消。6. 表格。本指令要求的 CNATRA 表格在培训学习管理系统 (T/LMS) 计算机程序中自动生成。 CNATRA 表格的其他副本可在 CNATRA 网站 https://www.cnatra.navy.mil/pubs/forms.htm 上获取。J. RIFAS 参谋长发布和分发:此指令已获准公开发布,并且仅可通过海军航空训练发行负责人网站 https://flankspeed.sharepoint-mil.us/sites/CPF-CNATRA/SitePages/Publications.aspx 以电子形式获取。

海军航空训练长 先进直升机...
目的................................................................................................................ X-1 学生职责和责任.................................................................................... X-1 一般标准................................................................................................... X-1 执行................................................................................................................... X-1 工作任务............................................................................................................ X-2 评分项目............................................................................................................ X-2 课程培训标准............................................................................................. X-2 1.一般知识/程序.................................................................... X-2 2.紧急程序.................................................................................... X-2 3.头部工作/情境意识............................................................. X-2 4.基本空中工作............................................................................. X-3 5.机组资源管理................................................................ X-3 6.驾驶舱管理 .............................................................................. X-4 7.检查表管理 .............................................................................. X-4 8.无线电程序 ................................................................................ X-4 9.飞行计划 ...................................................................................... X-5 10.NATOPS/任务简介 ............................................................................. X-5 11.地面操作 ............................................................................................. X-6 12.出发程序 ............................................................................. X-6 13.航路程序 ............................................................................. X-6 14.终端程序 ................................................................................ X-7 15.复飞(开机) .............................................................................. X-7 16.飞行指引仪的使用 .............................................................................. X-8 17 SAS 飞行停止 ...................................................................................... X-8 18.电源检查 ...................................................................................... X-8 19.能量管理 ................................................................................... X-9 20.熟悉级别速度变化 .............................................................. X-9 21.熟悉转弯模式 .............................................................. X-10 22.航线规则 ...................................................................................... X-10 23.垂直起飞 ...................................................................................... X-10 24.非悬停起飞 ............................................................................. X-11 25.最大负载起飞 ............................................................................. X-11 26.越障起飞 ............................................................................. X-11 27.中止起飞 ................................................................................ X-12 28.过渡到前飞 .............................................................................. X-12 29.悬停 ................................................................................................ X-12 30.悬停转弯 ...................................................................................... X-13 31.悬停滑行 ............................................................................................. X-13 32.低空作业 ............................................................................................. X-14

UPAC 直升机操作员安全指南
本文档中包含的信息仅供一般参考。它不适用于或代替经批准的直升机飞行手册、操作手册、操作规范或特定场地的安全计划。本文件的用户应查阅适用的联邦、州和地方法律、法规和指导材料,包括但不限于联邦航空管理局和职业安全与健康管理局发布的法规和指导材料。适用的法律、法规和指导材料应优先于本文提供的信息。直升机操作本身就很危险,没有任何安全指南可以完全消除所有风险,包括与此类操作相关的财产损失、人身伤害和死亡风险。
Ah-64 阿帕奇多任务战斗直升机
通过 FLIR 系统识别威胁极其困难。虽然 AH-64 机组人员可以轻松找到车辆的热信号,但可能无法确定敌友。前视红外线可检测物体热量发射的差异。在炎热的天气里,地面反射或发射的热量可能比可疑目标多。在这种情况下,环境会很“热”,而目标会很“冷”。随着夜间空气冷却,目标散热或散热的速度可能低于周围环境。在某些时候,目标和周围环境的热量发射可能相等。这是红外交叉,使目标捕获/检测变得困难甚至不可能。红外交叉最常发生在环境潮湿的时候。这是因为空气中的水在物体的发射率中形成了一个缓冲。所有使用 FLIR 进行目标捕获的系统都存在此限制。低云层可能不允许地狱火导引头有足够的时间锁定目标,或可能导致其在捕获后断开锁定。在远距离,飞行员可能必须考虑云层,以便让导引头有时间将武器转向目标。飞行员夜视传感器无法检测到电线或其他小障碍物。

旋翼通用直升机 - AUSA
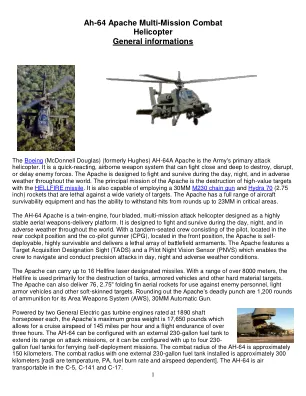
旋翼 AH-64 阿帕奇长弓直升机提供昼夜和恶劣天气攻击直升机能力。阿帕奇是陆军的主要攻击直升机。它是一种反应迅速的机载武器系统,可以近距离和纵深作战,以摧毁、扰乱或延缓敌军。当今陆军库存中的三种阿帕奇飞机是 AH-64D 长弓 Block I 和 Block II 以及最新的 AH-64E 阿帕奇。阿帕奇的最大速度为 145 节。它的最大总重量范围为 230 海里,并具有使用内部和外部油箱扩展范围的能力。阿帕奇拥有全套飞机生存设备,能够抵御 23 毫米以下子弹在关键区域的打击。阿帕奇弹药包括地狱火导弹(RF/SAL 版本)、2.75 英寸火箭弹(所有版本)和 30 毫米高爆燃烧弹 (HEI)。AH-64E 还具有有人/无人协同的互操作性 (LOI) 4 级能力。LOI 4 允许 AH-64E 接收无人机系统 (UAS) 视频、控制 UAS 的有效载荷并控制 UAS 的飞行路径。最初的 AH-64A 阿帕奇于 1984 年首次服役,现已从陆军库存中移除。所有剩余的 AH-64A 飞机都已纳入 AH-64D Block II 生产线。AH-64D Longbow Block II 的部署方式是新生产和再制造 AH-64A 飞机相结合。AH-64D 采用了 Longbow 火控雷达 (FCR),可在白天或夜晚、恶劣天气和战场遮蔽条件下使用。AH-64D 主要由桅杆安装的毫米波火控雷达、雷达频率干涉仪和雷达频率发射后不管的地狱火导弹组成。Block II 的生产已于 9 月结束。长弓的数字化目标捕获系统提供自动检测、定位、分类、优先排序和目标移交。AH-64D 驾驶舱经过重新设计,所有系统均数字化并实现多路复用。人力和人员整合计划机组人员站具有多功能显示器,可减少机组人员工作量并提高效率。AH-64D 为机动部队指挥官提供全天候、在任何条件下真正协调的快速射击(一分钟内打击 16 个独立目标)能力。阿帕奇机队的最新版本是 AH-64E 阿帕奇。AH-64E 计划于 2011 年 11 月交付了第一架飞机。AH-64E 项目与之前的阿帕奇维持项目类似,将更新或改造现有的空中
直升机运行数据记录计划指南
军事航空局 – 认证(结构和飞机设计标准) 军事航空局 – 认证(结构 1 – 大型飞机) 军事航空局 – 认证(结构 2 – 高速喷气式飞机和无人机) 军事航空局 – 认证(结构 3 – 直升机) 军事航空局 – 认证(结构 4 – Gen) 军事航空局 – 认证(ADS – DS970) DES DAT- 飞机工程经理 Prof S Reed,Dstl Dr M Mishon,1710 NAS Mr T Cook,Airbus UK Mr M Collins,Airbus UK Mr M Overd,Leonardo Helicopters Mr K Fisher,BAE Systems Mr D Patterson,Bombardier Aerospace Mr S Dosman,Marshall Aerospace Mr TBN,Marshall Aerospace Mr A Mew,QinetiQ 军事航空局 – 认证(结构 4a - Gen)

英国皇家海军新直升机 - 主页
罗彻斯特 Displays Systems Group 的光学设计团队最近与国际光学工程学会一起加入了一个奖励计划。他们的参赛作品是使用计算机生成的全息技术设计和开发离轴抬头显示器的组合元件。集团很高兴地宣布,该团队荣获 A E Conrady 奖,该奖项旨在表彰他们在光学系统和仪器的设计、构造和测试方面做出的杰出贡献,如果没有他们的贡献,这项技术就不可能发展到现在的状态。
机组人员训练手册 攻击直升机 AH-64D
任务 1411 执行地形飞行减速.......................................................................4-158 任务 1412 执行规避机动..............................................................................4-160 任务 1413 执行接触动作..............................................................................4-162 任务 1414 执行射击位置操作.............................................................................4-163 任务 1415 执行俯冲飞行......................................................................................4-166 任务 1416 执行武器初始化程序.............................................................................4-168 任务 1422 执行射击技术.............................................................................4-170 任务 1458 使用点目标武器系统攻击目标.............................................................4-174 任务 1462 使用火箭弹攻击目标.............................................................................4-194 任务 1464使用区域武器系统攻击目标................................................................................4-201 任务 1469 执行区域武器系统动态协调...............................................................4-206 任务 1470 执行目标交接................................................................................4-208 任务 1835 执行夜视系统操作检查.......................................................................4-211 任务 2010 执行多机操作....................................................................................4-214 任务 2013 执行战术火力计算机机载目标交接系统空中/转移模式操作.........................................................