XiaoMi-AI文件搜索系统
World File Search System相对运动

对行人行为预测的承诺和挑战
预测行人行为是确保自动驾驶汽车安全性和可靠性的关键。尽管通过从注释的视频框架序列中学习深入学习方法,但他们通常无法完全掌握行人与交通之间的动态相互作用,但可以进行准确的预测。这些模型也缺乏细微的常识推理。此外,这些模型的数据集的手动注释既昂贵又挑战,以适应新情况。视觉语言模型(VLM)的出现,由于其先进的视觉和因果推理技能,引入了这些问题的有希望的替代方案。据我们所知,这项研究是第一个在自主驱动的行人行为预测的概述中对VLM进行定量和定性评估的研究。 我们在公开可用的Pedes-Trian数据集上评估GPT-4V(ISION):JAAD和Wideview。 我们的定量分析重点是GPT-4V预测当前和未来帧中行人行为的能力。 该模型以零拍的方式达到了57%的精度,尽管令人印象深刻,但仍落后于最新的域特异性模型(70%),以预测行人交叉行动。 定性,GPT-4V表现出令人印象深刻的处理和解释综合交通情况,区分各种脚步行为以及检测和分析组的能力。 但是,它面临着挑战,例如难以检测较小的脚步 - 评估行人与自我车辆之间的相对运动。据我们所知,这项研究是第一个在自主驱动的行人行为预测的概述中对VLM进行定量和定性评估的研究。我们在公开可用的Pedes-Trian数据集上评估GPT-4V(ISION):JAAD和Wideview。我们的定量分析重点是GPT-4V预测当前和未来帧中行人行为的能力。该模型以零拍的方式达到了57%的精度,尽管令人印象深刻,但仍落后于最新的域特异性模型(70%),以预测行人交叉行动。定性,GPT-4V表现出令人印象深刻的处理和解释综合交通情况,区分各种脚步行为以及检测和分析组的能力。但是,它面临着挑战,例如难以检测较小的脚步 - 评估行人与自我车辆之间的相对运动。

带有重新构造的预处理MediaPipe关键点和孤立的手语识别的锚点
抽象孤立的手语识别(ISLR)的目的是将标志分类为相应的光泽,但由于快速运动和小动手变化,它仍然具有挑战性。基于姿势的方法,由于其对环境的鲁棒性而引起了人们的注意,这对于这种挑战性的运动和变化至关重要,这是由于难以从嘈杂的关键点捕获小的关节运动。在这项工作中,我们强调了预处理关键以减轻此类错误风险的重要性。我们使用锚点采用归一化来准确跟踪骨骼接头的相对运动,重点是手动运动。此外,我们实施双线性插值来重建关键点,特别是为了检索未检测到的手的缺失信息。这项工作中提出的预处理方法表明,通过在WLASL数据集上的数据增强,准确性提高了6.05%,并且在基于姿势的方法中最高的数据增加了准确性83.26%。所提出的方法显示出在手部形状重要性的迹象的情况下,尤其是当某些框架没有被发现的手时。
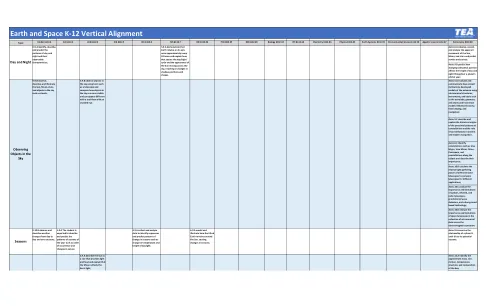
地球和太空 K-12 垂直对齐
地球.8.E 解释板块构造如何解释地质过程,包括海底扩张和俯冲,以及海脊、裂谷、地震、火山、山脉、热点和热液喷口等特征;地球.8.C 研究新的数据概念解释和创新地球物理技术如何导致当前的板块构造理论;地球.8.F 使用与速率、时间和距离相关的方程式计算板块的运动历史,以预测未来的运动、位置和由此产生的地质特征;地球.8.G 使用地震和火山分布的证据来区分汇聚、发散和变换板块边界的位置、类型和相对运动;地球.8.H 评估板块构造在地球子系统的长期全球变化中的作用,例如大陆沉积、冰川作用、海平面波动、大规模灭绝和气候变化。 Astro.5.B 研究和评估包括托勒密、哥白尼、第谷·布拉赫、开普勒、伽利略和牛顿在内的科学家的贡献,因为天文学从地心模型发展到日心模型;Astro.16.E 研究和描述天文学的当前发展和发现;

相对论运动下的基无关量子相干性及其分布
摘要 最近的研究越来越多地集中在相对论运动对量子相干性的影响上。先前的研究主要检查相对运动对基相关的量子相干性的影响,强调其在加速条件下易受退相干的影响。然而,相对论运动对基独立的量子相干性的影响仍然是一个有趣的悬而未决的问题,而这对于理解系统的内在量子特征至关重要。本文通过研究总相干性、集体相干性和局部相干性如何受到加速度和耦合强度的影响来解决这个问题。我们的分析表明,总相干性和集体相干性都会随着加速度和耦合强度的增加而显著降低,最终在高加速度水平下消失。这强调了 Unruh 热噪声的巨大影响。相反,局部相干性表现出相对稳定性,只有在无限加速度的极端条件下才会降至零。此外,我们证明了集体、局部和基独立相干性共同满足三角不等式。这些发现对于增强我们对高加速环境下量子信息动力学的理解至关重要,并为相对论条件下量子相干性的行为提供了宝贵的见解。

蒙版视频和肤色imu自动编码器用于以自我为中心动作识别
摘要。与视觉信号相比,放置在人体四肢上的惯性测量单元(IMU)可以捕获准确的运动信号,同时对照明变化和遮挡具有鲁棒性。尽管这些角色 - 在帮助以以上为中心的行动识别方面是有价值的,但IMU的潜力仍然不足。在这项工作中,我们提出了一种新颖的动作识别方法,该方法将来自人体磨损的IMU的运动数据与以自我为中心的视频相结合。由于标记的多模式数据的稀缺性,我们设计了一种基于MAE的自我监管预处理方法,通过对视觉和运动信号之间的自然相关性进行建模,从而获得了强大的多模式表示。为了建模整个体内的多个IMU设备的复合关系,我们利用了多个IMU设备中的协作动力学,并建议将人类关节的相对运动特征置入图形结构中。实验表明我们的方法可以在多个公共数据集上实现最新性能。在更具挑战性的场景中,我们的基于MAE的预培训和基于图的IMU建模的有效性得到了进一步的验证,包括部分缺少IMU设备和视频质量损坏,从而促进现实世界中更灵活的用法。

使用3D高斯弹奏
摘要 - 可推广的感知是太空机器人技术中高级自治的支柱之一。估计动态环境中未知对象的结构和运动对于此类自主系统至关重要。传统上,解决方案依赖于目标对象的先验知识,多个不同的表示或不适合机器人操作的低保真输出。这项工作提出了一种新颖的方法,可以使用统一表示形式来逐步重建和跟踪动态未知对象 - 一组3D高斯斑点,描述了其几何形状和外观。可区分的3DGS框架适合以动态对象设置。管道的输入是一组顺序的RGB-D图像。3D重建和6-DOF姿势跟踪任务是使用基于一阶梯度的优化来解决的。该公式很简单,不需要预训练,不假定对对象或其运动的先验知识,并且适合在线应用程序。在任意相对运动下的10个未知航天器的数据集中验证了所提出的方法。实验表明,在短期到中持续时间内,目标对象的成功3D重建和准确的6-DOF跟踪。讨论了跟踪漂移的原因,并概述了潜在的解决方案。

基于干涉视觉导航 (iVisNav) 的 FPGA 框架
摘要 — 干涉视觉导航 (iVisNav) 是一种用于自主近距离操作的新型光电传感器。iVisNav 采用激光发射结构化信标,通过测量发射激光脉冲相位的变化来精确表征六个自由度相对运动速率。iVisNav 的嵌入式包必须有效处理高频动态,以实现稳健的传感和估计。本文开发了一种基于最小二乘的速率估计新嵌入式系统。由此产生的系统能够与光子学接口并在现场可编程门阵列中实现估计算法。嵌入式包被证明是一种硬件/软件协同设计,使用有限精度算法进行高速计算来处理估计程序。将有限精度 FPGA 硬件设计的精度与 MATLAB 上算法的浮点软件评估进行比较,以对其性能和与误差测量的统计一致性进行基准测试。实施结果证明了 FPGA 计算能力在使用 iVisNav 进行高速近距离导航方面的实用性。索引术语 — 干涉测量法、状态估计、最小二乘法、FPGA

征文通知 第 34 届 AIAA/AAS ...
● 太空飞行的动力系统理论 ● 太空飞行的机器学习和人工智能 ● 地球轨道和行星任务研究 ● 轨迹机动设计和优化 ● 行星际任务设计 ● 小行星和小天体任务 ● 轨道动力学和碎片 ● 轨道确定和估计 ● 空间态势感知(与 GNC 联合轨道) ● 地月天体动力学、任务和操作 ● 姿态动力学、确定和控制 ● 卫星星座、编队和相对运动 ● 卫星会合和近距离操作 ● 空间组装、制造和空间机器人 ● 特别会议:空间机动和物流 将根据扩展摘要的质量、工作和/或想法的原创性以及对拟议主题的预期兴趣来接受手稿。基于实验结果或当前数据或报告正在进行的任务的提交也会引起人们的兴趣。鼓励来自工业界、政府和学术界的贡献。我们还鼓励提交包含多学科研究和国际合作的论文。会议前必须提交完整的手稿。英语是会议的工作语言。更多最新信息可在会议网站 https://www.aiaa.org/scitech/ 上找到。该网站还链接到摘要和手稿提交流程,可通过演示文稿和论文链接访问。

NORBAR 产品目录 - cet.hu
• 大多数扭矩紧固接头不使用垫圈,因为使用垫圈会导致紧固过程中螺母和垫圈之间或垫圈和接头表面之间产生相对运动。这会改变摩擦半径,从而影响扭矩-张力关系。如果需要更大的轴承面,则可以使用法兰螺母或螺栓。如果要使用垫圈,与螺栓杆紧密贴合的硬垫圈可提供更低、更一致的摩擦,通常是首选。• 去除紧固件上通常存在的油膜会降低给定扭矩的张力,并可能导致紧固件在达到所需张力之前发生剪切。• 由石墨、二硫化钼和蜡配制的超级润滑剂可产生最小的摩擦。除非在指定的紧固扭矩中留有余地,否则诱导张力可能会过大,导致螺栓屈服和失效。但是,如果以可控的方式使用,这些润滑剂可以有效地降低扭矩,以产生所需的张力,这意味着可以使用较低容量的紧固工具。• 出于外观或耐腐蚀的原因,紧固件可能会镀层。这些处理会影响摩擦系数,从而影响扭矩与张力的关系。• 通常会故意在紧固件中引入摩擦,以减少因振动而松动的可能性。在确定正确的紧固扭矩时,必须考虑诸如锁紧螺母之类的装置。

水到土地过渡的神经生态学和脊椎动物脑的演变
脊椎动物进化中的水对土地过渡提供了一个异常的机会,可以考虑计算大脑新生态的计算。所有的感觉方式都会改变,尤其是由于空气与水作为培养基而引起的大大扩大的视觉感官,并通过移动眼睛和颈部扩展。四肢的繁殖,随着进化为利用土地上生活方面的发展,是一项可比的计算挑战。由于土地上生物的总质量比质量水下大的一百倍,计算改进有望获得丰厚的回报。在水中,中脑底座坐标接近/避免通过水流和动物的身体状态和学习的情况进行决策。在土地上,必须解决感觉表面和效应子的相对运动,并增加了背骨的计算体系结构,例如顶叶皮层。对于大脑和悠久的土地居民来说,做出正确的决定时,做出了正确的决定,这意味着死亡可能是计划的基础,这使动物可以在颁布之前从假设的经验中学习。在基底神经节/额叶皮层电路中的价值加权,记忆全景的整合,以及海马及其相关皮质的同种中心认知图成为一种认知习惯习惯习惯性的过渡,与生态学的变化相同。