机构名称:
¥ 1.0
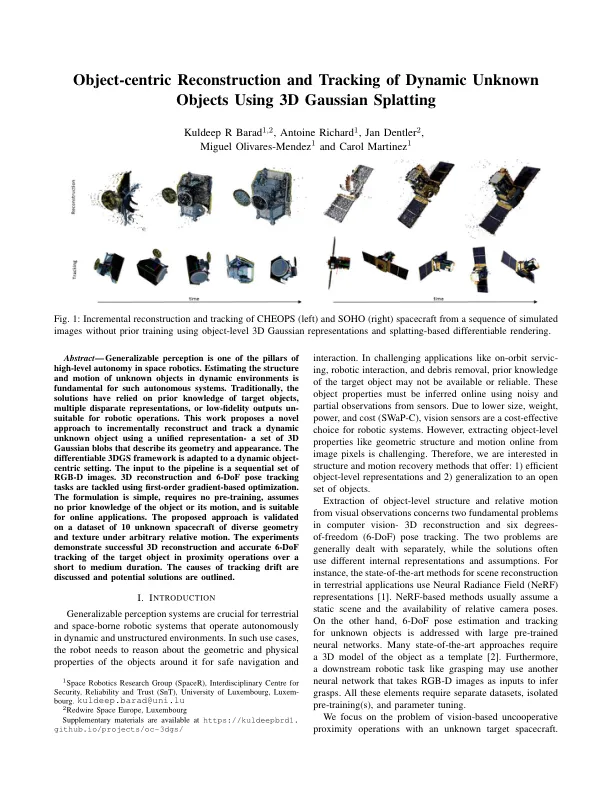
摘要 - 可推广的感知是太空机器人技术中高级自治的支柱之一。估计动态环境中未知对象的结构和运动对于此类自主系统至关重要。传统上,解决方案依赖于目标对象的先验知识,多个不同的表示或不适合机器人操作的低保真输出。这项工作提出了一种新颖的方法,可以使用统一表示形式来逐步重建和跟踪动态未知对象 - 一组3D高斯斑点,描述了其几何形状和外观。可区分的3DGS框架适合以动态对象设置。管道的输入是一组顺序的RGB-D图像。3D重建和6-DOF姿势跟踪任务是使用基于一阶梯度的优化来解决的。该公式很简单,不需要预训练,不假定对对象或其运动的先验知识,并且适合在线应用程序。在任意相对运动下的10个未知航天器的数据集中验证了所提出的方法。实验表明,在短期到中持续时间内,目标对象的成功3D重建和准确的6-DOF跟踪。讨论了跟踪漂移的原因,并概述了潜在的解决方案。
使用3D高斯弹奏
主要关键词



相关文件推荐