XiaoMi-AI文件搜索系统
World File Search System着陆

1 用于多拷贝基因整合的着陆垫系统...
图 1. SD108 中全基因组整合位点的计算机筛选算法。(A)选择基因间位点中的 gRNA 进行 iCas9 介导的整合。扫描基因组中的“NGG”PAM 以获得向导 RNA 文库。筛选 gRNA 以尽量减少潜在的脱靶,并根据其基因组位置进行过滤。(B)结合各种因素对实验筛选的基因组位点进行优先排序。根据寡核苷酸合成和质粒克隆标准对 gRNA 及其相应的同源臂进行改进。实施设计规则以确保菌株稳定性,避免破坏调控元件并包括基因必需性信息,同时添加基因密度作为开放染色质的代理。结合转录组学数据来选择靠近转录活性基因的位点。
软着陆Koffman Southern Tier孵化器手册2023
随着康奈尔大学农业与生命科学学院的全球影响力和优势,南部地区正成为粮食和农业技术领域的世界认可的领导者。整个地区的研究机构和资源有助于开发和支持新的农业综合企业,并助长了快速增长的创新AG中心。一个动态的创新与合作枢纽,康奈尔·阿格里特(Cornell Agritech)的粮食和农业卓越中心利用了康奈尔大学(Cornell University)的无与伦比的研究和专业知识,以加速纽约州的增长和地位,成为纽约州的粮食和农业预付款。成长的食品和农业竞赛是由康奈尔大学管理的商业竞赛。它专注于在纽约州北部的纽约种植持久的食品和农业创新集群。比赛吸引了来自全球的创新,高增长的食品和农业初创企业,并参与该地区快速发展的初创企业社区,而Agrifood System

Chandrayaan-3替代着陆点
印度的第三次月球任务Chandrayaan-3将在月球高纬度位置部署一个着陆器和一个流浪者,使我们能够对这种原始位置进行有史以来的首次原位科学调查,这将有可能提高我们对主要地壳形成和后续修改过程的理解。主要着陆点(PLS)位于69.367621°,32.348126°。作为偶然性,在几乎相同的纬度上选择了替代着陆点(ALS),但向西约450 km至PLS。在这项工作中,使用了有史以来最好的高分辨率Chandrayaan-2 OHRC Dems和Ortho-images进行了对ALS的地貌,组成和温度特征的详细研究,该数据是从Chandrayaan-1和On Incon each each each each each each eachine lunar侦察机获得的数据集。为了理解热物理行为,我们使用了一个完善的热物理模型。我们发现Chandrayaan-3 ALS的特征是平滑的地形,中央部分相对较高。als由埃拉托斯尼(Eratosthenian)年龄的莫雷特斯(Moretus-A火山口)主导,位于Tycho Crater的喷出毯上。ALS是一个科学有趣的地点,可以从Tycho和Moretus中取出弹射材料。然而,由于存在Eratosthenian年龄喷射材料,该地点是巨石富集,OHRC得出的危险图证实了ALS内的75%无危险区域,因此适合着陆和漫游者操作。带有APX和LIBS板上的Tycho弹出的痕迹将有助于理解ALS内的组成变化。基于位点的光谱和元素分析,Fe的重量百分比约为4.8(wt。%),毫克〜5 wt。%和Ca〜11 wt。%。在构图上,ALS类似于具有典型的高地土壤类型组成的PL。的空间和昼夜变异性约为40 K和〜175 K。与PL相比,ALS属于类似位置,但与PL相比,ALS显示出降低的白天温度和夜间温度的降低,这表明与PL相比具有独特的热物理特征。像PLS一样,ALS似乎也是科学调查的有趣场所,Chandrayaan-3有望为对月球科学的理解提供新的见解,即使它恰好降落在替代着陆点。

飞机起飞和着陆影响因素分析
飞机着陆是飞行的最终阶段,飞机从 15 米的高度缓慢飞行,着陆后完全停止,然后在跑道上滑行 [4]。着陆是最困难的飞行阶段,要求飞行员具备非常高的驾驶技能 [1]。着陆是通过减速并下降到跑道来完成的。减速是通过减少推力和/或使用襟翼、起落架或减速板产生更大的阻力来实现的。飞行的起飞过程可分为两个主要阶段 - 加速和起飞。这些阶段由其他某些子阶段划分。航空工业的进步现在已经达到了所有这些阶段都可以在没有飞行员参与的情况下进行的程度,即使用自动驾驶系统。在民航中,无人系统仍被谨慎使用,主要仅在水平飞行阶段,并且仍由机组人员控制。然而,主要是经验丰富的飞行员执行着陆过程。由于着陆时所有动作的复杂性和危险性,根据统计,此阶段被认为是最危险的阶段 [2]。这项工作的目的是分析影响地面路径长度的因素,并开发一种系统,该系统可以在飞机着陆后完全自动停止飞机,或者至少帮助飞行员确定剩余的制动距离,以防止危险情况。开发的系统和方法将告知机组人员剩余的制动距离。系统计算包括跑道的剩余长度,以飞机配备的系统的输出信号为基础 [3]。系统还考虑了各种因素,例如天气条件 [7]、刹车和轮胎状况、刹车率、减速统计、特定飞机的空气动力学特性 [5, 9]、控制方法 [12] 等。本文分析了飞机的刹车距离。根据事故统计,开发一种能够控制飞机着陆后和起飞期间刹车距离的自动化装置非常重要 [2]。该装置能够随时计算必要的制动力,以合理使用飞机的刹车系统,最大限度地延长轮胎和刹车的磨损,确保乘客安全并排除飞行员失误的可能性 [6],以及用各种材料制成的元件和结构的强度 [8, 10, 11]。
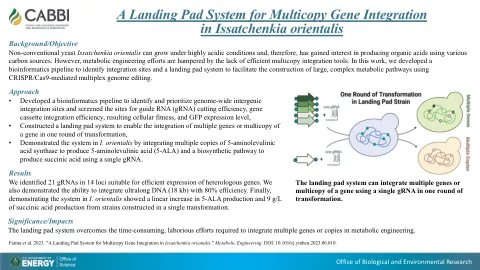
Fatma 等人,2023 年。“东方伊萨酵母中用于多拷贝基因整合的着陆垫系统。”代谢工程。DOI:10.1016/j.ymben.202
方法 • 开发了生物信息学流程来识别和确定全基因组基因间整合位点的优先顺序,并筛选了引导 RNA(gRNA)切割效率、基因盒整合效率、由此产生的细胞适应性和 GFP 表达水平的位点,• 构建了着陆垫系统以实现在一轮转化中多个基因或基因的多拷贝的整合,• 通过整合多个拷贝的 5-氨基乙酰丙酸合酶来产生 5-氨基乙酰丙酸(5-ALA)和使用单个 gRNA 产生琥珀酸的生物合成途径,在 I. orientalis 中展示了该系统。

东方伊萨酵母多拷贝基因整合的着陆垫系统
非传统酵母东方伊萨酵母 (Issatchenkia orientalis) 的强健特性使其能够在高酸性条件下生长,因此,人们对使用多种碳源生产有机酸的兴趣日益浓厚。最近,东方伊萨酵母的遗传工具箱的开发,包括附加型质粒、多个启动子和终止子的特征以及 CRISPR-Cas9 工具,简化了东方伊萨酵母的代谢工程工作。然而,由于缺乏有效的多拷贝整合工具,多重工程仍然受到阻碍。为了促进通过多重 CRISPR-Cas9 介导的基因组编辑构建大型复杂代谢途径,我们开发了一条生物信息学流程来识别和确定全基因组基因间位点的优先级,并表征了位于 21 个基因间区域的 47 个 gRNA。对这些位点进行了向导 RNA 切割效率、基因盒的整合效率、由此产生的细胞适应度和 GFP 表达水平的筛选。我们进一步利用来自这些已充分表征的基因座的组件开发了一种着陆垫系统,该系统可帮助利用单个引导 RNA 和用户选择的多个修复模板整合多个基因。我们已经证明了利用着陆垫同时将 2、3、4 或 5 个基因整合到目标基因座中,效率超过 80%。作为概念验证,我们展示了如何通过一步整合多个位点的五个基因拷贝来提高 5-氨基乙酰丙酸的产量。我们进一步证明了该工具的效率,即利用单个引导 RNA 和五个不同的修复模板整合五个基因表达盒,构建了琥珀酸生产代谢途径,从而在批量发酵中生产出 9 g/L 的琥珀酸。这项研究证明了单个 gRNA 介导的 CRISPR 平台在非传统酵母中构建复杂代谢途径的有效性。该着陆垫系统将成为 I. orientalis 代谢工程的宝贵工具。

海军外围着陆场帝国海滩,加利福尼亚州 2022 年...
加州帝国海滩 2022 年消费者信心报告 科罗纳多海军基地 (NBC) 致力于在海军外围着陆场 (NOLF) 为您提供安全可靠的饮用水。NBC 认为,为您提供有关水的准确信息是确保您的水安全的最佳方式。消费者信心报告 (CCR) 必须在每年 7 月 1 日之前分发,以提供上一年的结果。此 CCR 是 2022 年饮用水质量的快照。本年度报告的目的是告知消费者他们的水来自哪里,提供水质数据,增进对饮用水的更多了解,并提高节约水资源的意识。Español:本报告包含有关其饮用水的非常重要的信息。请将海军外围着陆场的通讯发给 kevin.b.dixon.civ@us.navy.mil 以西班牙语协助。海军外围着陆场水源 NBC 从加州美国水务公司 (CalAm) 购买 NOLF 饮用水,饮用水通过帝国海滩市的连续供水系统输送。帝国海滩市从圣地亚哥市购买经过处理的地表水。圣地亚哥市从圣地亚哥县水务局获得 80% 到 90% 的原地表水供应,其余来自当地水库。圣地亚哥县水务局又从南加州大都会水区 (MWDSC) 以及其他水务机构获得大部分供水。MWDSC 有两个主要原水源:科罗拉多河和萨克拉门托河三角洲。水通过科罗拉多州和加利福尼亚州的渡槽输送到 MWDSC。然后,MWDSC 的水通过圣地亚哥县水务局输送到圣地亚哥县地区,约占圣地亚哥市供水量的 80% 到 90%。水流经海军拥有的管道,该管道为 NOLF 的配水系统供水。一旦水到达 NOLF,海军设施工程系统司令部西南 (NAVFAC SW) 将运营和维护您的饮用水系统,并致力于通过每月监测大肠杆菌来确保饮用水质量。关于饮用水 饮用水的来源(自来水和瓶装水)包括河流、湖泊、溪流、池塘、水库、泉水和水井。地表水经过处理后可饮用,而地下水可能经过或未经过任何处理。当水流过地表或穿过地面时,它会溶解天然存在的矿物质,在某些情况下还会溶解放射性物质,并会吸收由动物存在或人类活动产生的物质(污染物)。源水中的污染物可能来自化粪池系统、生活或工业废水处理设施的排放、农业和耕作活动、城市雨水径流、住宅用途和许多其他类型的活动。源水中可能存在的污染物包括:微生物污染物,例如病毒和细菌,可能来自污水处理厂、化粪池系统、农业畜牧业和野生动物。无机污染物,例如盐和金属,可能是自然产生的,也可能是城市雨水径流、工业或生活废水排放、石油和天然气生产、采矿或农业产生的。杀虫剂和除草剂,可能来自农业、城市雨水径流和住宅用途等各种来源。有机化学污染物,包括合成和挥发性有机化学物质,它们是工业过程和石油生产的副产品,可能来自加油站、城市雨水径流和化粪池系统。

飞机着陆应用 - HAL 激光门户
摘要:飞机在着陆过程中的位置是关键。一组传感器提供数据以获得对飞机定位的最佳估计。然而,数据可能包含异常。为了保证传感器的正确行为,必须检测异常。然后,要么隔离故障传感器,要么过滤检测到的异常。本文提出了一种用于检测和纠正异常的新型神经算法,称为 NADCA。该算法使用紧凑的深度学习预测模型,并使用真实着陆信号中的真实和模拟异常进行了评估。NADCA 检测和纠正快速变化和缓慢移动的异常;无论信号的振荡程度如何,它都是稳健的,并且不需要隔离具有异常行为的传感器。无论传感器精度如何,NADCA 都可以实时检测和纠正异常。同样,NADCA 可以处理不同传感器中同时发生的异常,并避免信号之间可能出现的耦合问题。从技术角度来看,NADCA 使用一种新的预测方法和一种新的方法来实时获得平滑信号。 NADCA 的开发是为了检测和纠正飞机着陆过程中的异常情况,从而改善向飞行员提供的信息。尽管如此,NADCA 是一种通用算法,在其他情况下也很有用。NADCA 评估显示,异常检测的平均 F 值是 0.97,平均均方根误差 (R
应用于飞机着陆 - Portail HAL laas
摘要:飞机在着陆过程中的位置至关重要。一组传感器提供数据以获得对飞机定位的最佳估计。但是,数据可能包含异常。为了保证传感器的正确行为,必须检测异常。然后,要么隔离故障传感器,要么过滤检测到的异常。本文提出了一种用于检测和纠正异常的新型神经算法,称为 NADCA。该算法使用紧凑的深度学习预测模型,并使用真实着陆信号中的真实和模拟异常进行了评估。NADCA 检测和纠正快速变化和缓慢移动的异常;无论信号的振荡程度如何,它都很稳健,并且不需要隔离具有异常行为的传感器。无论传感器精度如何,NADCA 都可以实时检测和纠正异常。同样,NADCA 可以处理不同传感器中同时发生的异常,并避免信号之间可能出现的耦合问题。从技术角度来看,NADCA 使用一种新的预测方法和一种新的方法来实时获得平滑信号。NADCA 已被开发用于在飞机着陆期间检测和纠正异常,从而改善向飞行员呈现的信息。尽管如此,NADCA 是一种通用算法,在其他情况下可能有用。NADCA 评估给出的异常检测平均 F 值是 0.97,异常纠正平均均方根误差 (RMSE) 值是 2.10。

垂直起飞和着陆的开发和测试...
1。简介一般而言,飞机可以分为两类:固定翼和旋转翼,既有优点和缺点。传统固定翼航空车的空气动力学在[1]中介绍,[2-4]中的传统旋转飞机在[1]中提供。关于物体的空气动力学,它受两个主要力的影响:升降和拖动。升力作用于相对风,并反对另一种称为重量的力。阻力与相对风平行,并反对称为推力的力。固定翼航空车的运行取决于有足够的起飞跑道的可用性,这导致了该地点的关键选择。另一方面,这种平台的飞行范围明显长于旋转翼航空车提供的时间。在[3,4]中,有关影响旋转空中的空气动力学的更详细的研究