机构名称:
¥ 1.0
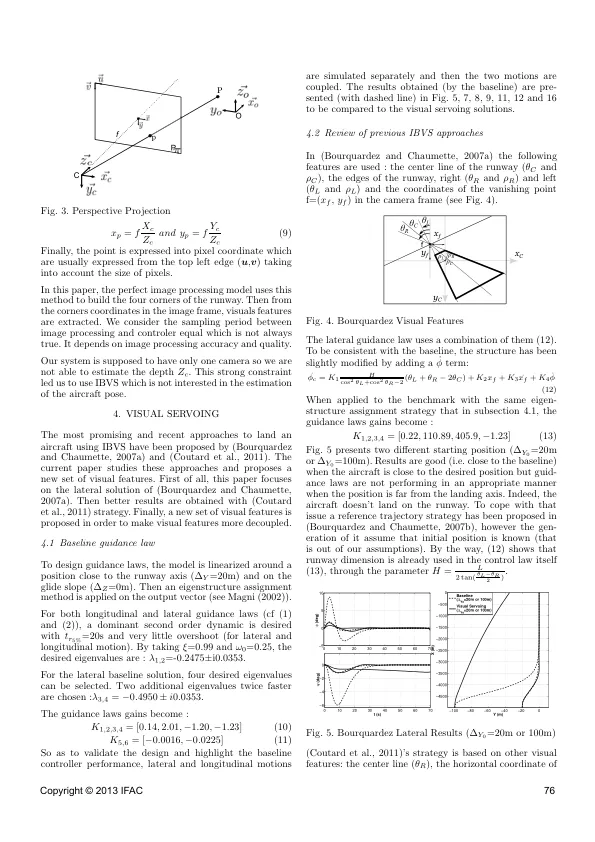
cos 2 θ L +cos 2 θ R − 2 ( θ L + θ R − 2 θ C ) + K 2 x f + K 3 ˙ x f + K 4 ˙ φ (12) 当将其应用于具有与第 4.1 节中相同的特征结构分配策略的基准时,制导律增益变为: K 1 , 2 , 3 , 4 = [0 . 22 , 110 . 89 , 405 . 9 , − 1 . 23] (13) 图 5 显示了两个不同的起始位置(∆Y 0 = 20m 或 ∆Y 0 = 100m)。 当飞机接近期望位置时,结果很好(即接近基线),但是当位置远离着陆轴时,制导律无法以适当的方式执行。事实上,飞机并没有降落在跑道上。为了解决这个问题,在(Bourquardez and Chaumette,2007b)中提出了一种参考轨迹策略,然而它的生成假设初始位置是已知的(这超出了我们的假设)。顺便说一句,(12)表明跑道尺寸已经通过参数 H = L 应用于控制律本身(13)中
使用基于图像的视觉伺服技术实现客机着陆
主要关键词


相关文件推荐