XiaoMi-AI文件搜索系统
World File Search System短臂

短食供应链中的问题和挑战
摘要:消费者越来越喜欢更直接,更透明的食物分配渠道,例如短食品供应链(SFSC)。尽管如此,SFSC在创造和运作时面临着各种问题和挑战,导致了有限的性能和可持续性,以及高扫描的困难。这项研究旨在通过对最新文献进行系统评价来提高我们对SFSC的问题/挑战的理解。我们对44项研究进行全文内容分析,寻找研究问题的答案:SFSC的哪些部分会发生/挑战?我们如何表征SFSC中的问题/挑战?在这样做的同时,我们就SFSC提供了整体观点。我们利用SCOR模型来定义SFSC过程,并描述这些问题/挑战的性质。这项研究的发现阐明了SFSC中问题/挑战的性质和战略性运营水平,并指出了现有文献中的局限性,例如被忽略的SFSC过程。我们建议的整体方法以及我们提供的SFSC问题/挑战的见解可以帮助研究人员提供有效的解决方案和策略来支持SFSC的整体发展。

短食供应链的业务策略途径
短食供应连锁店在将当地生产商与消费者联系起来,促进持续能力,支持当地经济体以及提供新鲜,高质量的产品方面起着至关重要的作用。但是,由于消费者需求与生产者供应之间的不匹配,他们的市场仍然不发达。这项工作的目的是确定生产者和消费者在短食供应链中的共同愿景,提出了为有效的商业策略提出关键行动,以在领土层面改善替代食品系统。培养短食品供应连锁店的战略长期愿景是基于直接农民到零售商的模型。基于意大利Emilia-Romagna的古代谷物供应链的案例,这项研究依赖于包括定量和定性方法的混合方法方法。由1122个意大利家庭的代表性样本进行的家庭调查允许识别四个消费者概况。然后,与10个食品供应链利益相关者进行的两个焦点小组导致识别六个主题行动领域。通过背景方法,古代谷物供应链参与者提出了一系列业务行动,以达到消费者的喜好。最后,两轮Delphi与23位食品供应链专家进行了验证,从2023年到2030年将采用18个行动,以实现业务策略途径。业务策略途径可以增加古代谷物产品的当地市场存在,帮助生产者计划未来的业务活动并披露消费者偏好或市场状况的变化。

npu生物多样性基线短底漆
您可以使用公共记录或使用公民科学平台(例如Inaturalist)检查网站上已经在您的网站上记录了哪些物种。这可能会突出特定的物种或关注或兴趣的生态系统,并可以为未来的调查和监测提供一个起点。

绝缘玻璃纤维臂无线电控制系统钢铁人...
标准IWP设备•篮子控件•500kV锋利的电击环•测试带和盾牌•密封的玻璃纤维夹具组装•两人,36'x 72''(914 x 1829 mm)篮子•1,000 lb(454 mm)容量(454 mm)容量充电器•工厂安装•侧架,绝缘的臂臂选项•765kV•单人或定制篮•液压发音•900-1,200 lb(408-544 kg)旋转篮•45°JIB电源
使用 EMG 臂带的用户界面 - TUM Wiki-System
我要感谢所有促成这个项目的人。首先,我要感谢 Gudrun Klinker 教授和计算机辅助医疗程序与增强现实系主任为我提供这篇论文。其次,我要感谢我的导师 Sandro Weber 愿意提供这样一个项目并在我的整个工作过程中给予支持。最后,我要感谢 Thalmic Labs 提供 Myo 软件的源代码和易于阅读的 Unity3D API。我还要感谢以下所有参与用户研究并在四个月内为我的工作提供各方面帮助的人(按字母顺序排列):Okan Agca Larissa Akcetin Alp Danisman Clemens Fromm Onur Kilimci Özge Kilimci Konstantin Kirilov Waltentin Lamonos Kivanc Mertek Alex Müller Felix Novoa Ozan Pekmezci Daniel Schroter Berkay Soykan Kagan Tunca Oktay Turan Katarina Weber Baris Yolsal

使用ESP32和PS3控制器的机器人臂车辆
该项目调查了机器人ARM车辆的设计,实施和性能评估,以解决ESP32微控制器,PS3控制器和伺服电动机集成到统一系统中所遇到的挑战和解决方案。此外,本文强调了该技术的潜在应用,包括其在教育环境,研究设施和工业自动化中的相关性。通过此分析,我们旨在证明在创建高级机器人系统中具有成本效益且可广泛可用的组件的功能。通过将ESP32微控制器的功能与PS3控制器提供的用户友好控件合并,我们建立了一个可以针对各种任务和设置量身定制的多功能平台。

设计和仿真多度自由机器人臂
摘要:这项研究介绍了利用凉亭和机器人操作系统(ROS)的多度机器人臂的设计和模拟。该方法包括通过结构化方法集成硬件和软件组件的集成。关键硬件元素包括电动机,电机控制器,微控制器,伺服器和相机,全部由受监管的12V直流电源提供动力。微控制器处理传感器输入并控制电动机操作,而相机提供了可视反馈,以进行对象检测和跟踪。软件实现涉及开发用于模块化控制的ROS节点,将诸如逆运动学和路径计划(例如逆控制算法)结合到微控制器固件中。机器人臂的乌尔德FF模型被进口到凉亭中进行仿真,从而在受控的虚拟环境中进行性能验证。凉亭中的各种测试方案评估了机器人部门在处理物体和避免障碍等活动中的表现。ROS与凉亭的集成可以实时测试,迭代改进,并确保最终设计符合所需的规格。这种全面的方法导致了坚固且可靠的多度机器人手臂系统,突出了将ROS和凉亭组合起来,以进行高级机器人模拟和应用。
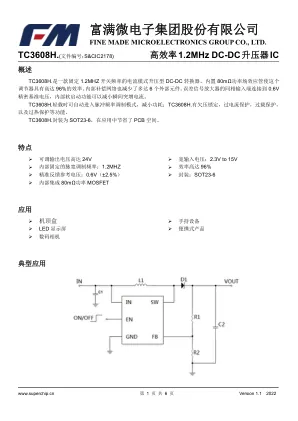
富满微电子集团股份有限公司
1 、电源走线包括 GND 、 SW 和 IN ,走线必须保证宽和短。 2 、 SW 、 L 和 D 开关的节点,布线要宽和短,以减少电磁干扰。 3 、输入和输出电容尽量贴近芯片放置。 4 、 R1 和 R2 和 FB 脚连线必须尽可能保证短。 5 、 FB 脚反应灵敏,应远离 SW 。 6 、芯片 GND 、 CIN 和 Cout 应连接较近,直接到地线层。
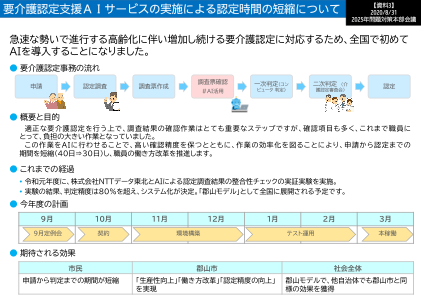
通过实施基于AI的护理认证支持服务来缩短认证时间......
确认调查结果是作出适当的护理证明的一个非常重要的步骤,但需要检查的项目很多,到目前为止这对工作人员来说是一个沉重的负担。 通过让AI承担此项工作,在保持较高确认准确度的同时,提高工作效率,缩短从申请到认证的时间(从40天缩短至30天),推动员工的工作方式改革。
报告
这份有关自动系泊系统的技术报告是SFI Autoship Work Poffect 5可持续运营的一部分。本研究已经调查了现有的自动系泊系统是否适合以下三种用例:渡轮,短队集装箱船和深海散装船。该报告介绍了当今存在的自动系泊系统。它们是基于真空的,磁性的或机器人的臂。对于渡轮用例,现有的Quayside安装的自动系泊系统目前已商购,经过彻底测试且适合用例,但是有一些有关系统性能不稳定的报道。在深海散发船上也是如此,假设这些船只在可用的自动真空系泊系统的端口之间运行。对于短船容器船,假定该船在港口之间运行,而无需任何自动锻炼基础架构。对于此用例,该船需要将自动系泊系统本身带来。这是通过使用机器人臂来解决的;但是,这些系统目前处于测试阶段,并且尚未在正常操作中进行彻底测试。