XiaoMi-AI文件搜索系统
World File Search System移动机器人

移动机器人导航中的进步和挑战
抽象的移动机器人导航一直是研究人员的实践非常流行的话题。是为了增强移动机器人导航的自主权,已独立地建立和实施了许多算法(传统的基于AI的基于AI的基于AI,基于AI的智能,基于自我学习的)。然而,由于这些算法的限制,有效自主机器人导航的问题持续了多个程度。缺乏对实施技术及其缺点的知识,这是对这一主题进一步发展的障碍。这就是为什么关于先前实施的算法,其适用性,弱点以及其潜力需要进行的广泛研究,以评估如何改善移动机器人导航性能。在本评论论文中,已经对移动机器人导航算法进行了全面审查。调查结果表明,即使自学习算法需要大量的培训数据并具有学习错误的行为,他们具有巨大的潜力来克服其他传统算法很少解决的挑战。发现还暗示,在基于机器学习的算法的领域中,将知识表示与神经符号的方法集成在一起,具有通过大量利润来提高自动导航训练的准确性和性能。

合作移动机器人技术:前因和指示
John C. Dodd博士是国际生物技术学院(wwwbio.ukc.ac.uk/iibmircen)的生物技术MIRCEN主任,基于肯特大学(UKC)的肯特大学(UKC),UKC),UKC和Biosciences的荣誉高级研究员。他还是欧洲银行(BEG)的共同指导者,该银行经营着在线生态数据库和遗传档案(wwwbio.ukc.ac.uk/beg),用于arbuscular mycorrhizal Fungi。他已经广泛发表过关于菌根真菌的广泛发表,其中包括各种温带和热带生态系统以及植物病理学和农艺学的应用和基础研究。他的总体目标是研究如何在植物生产中进行这些好处,例如农业系统,降级地点的重新造林或生态恢复。这个目标符合利用微生物的自然生物多样性来实现生物技术过程,作为遗传操纵的替代选择。最近,他促进了在英国的菌根真菌的应用,帮助一家公司(Plantworks,Plantwksuk@aol.com)为市场生产“调谐”产品。

自动驾驶汽车:移动机器人AI简介
宗教住宿政策:华盛顿州法律要求西澳大学制定一项政策,以适应学生缺席或由于信仰或良心的原因或有组织的宗教活动而造成的巨大困难。在宗教住宿政策上提供了UW政策,包括有关如何要求住宿的更多信息。必须在本课程的前两周内使用宗教住宿请求要求住宿。

移动机器人障碍物检测和避免NAV ...
摘要 - 智能机器人技术在维护,维修和大修(MRO)机库操作方面具有重要意义,其中移动机器人可以在其中导航复杂而动态的环境,以进行飞机视觉检查。飞机机库通常忙碌而变化,形状和尺寸各不相同,呈现出严格的障碍物和条件,可能导致潜在的碰撞和安全危害。这使得障碍物检测和避免对安全有效的机器人导航任务至关重要。常规方法已在计算问题上应用,而基于学习的方法的检测准确性受到限制。本文提出了一个基于视觉的导航模型,该模型将预训练的Yolov5对象检测模型集成到机器人操作系统(ROS)导航堆栈中,以优化复杂环境中的障碍物检测和避免。该实验在ROS-Gazebo模拟和Turtlebot3 Waffle-Pi机器人平台中进行了验证和评估。结果表明,机器人可以越来越多地检测并避免障碍物,而无需碰撞,同时通过不同的检查点导航到目标位置。关键字 - 自主导航,对象检测,避免障碍物,移动机器人,深度学习

基于人工智能的移动机器人与障碍物交互控制
摘要:本文研究了人工智能在Gazebo模型上实现深度确定性策略梯度(DDPG)以及现实移动机器人的应用。实验研究的目标是引导移动机器人在面对固定和移动障碍物时,学习在现实环境中移动的最佳动作。当机器人在有障碍物的环境中移动时,机器人会自动控制避开这些障碍物。然后,在特定限制内维持的时间越长,积累的奖励就越多,因此会取得更好的结果。作者对许多变换参数进行了各种测试,证明了DDPG算法比Q学习、机器学习、深度Q网络等算法更有效。然后执行SLAM来识别机器人位置,并在Rviz中精确构建和显示虚拟地图。研究结果将成为设计和构建移动机器人和工业机器人控制算法的基础,应用于编程技术和工业工厂自动化控制。索引词——移动机器人、人工智能、DDPG 算法、自主导航、强化学习。

自主移动机器人实习生(IDA:2024-00044)
•ubuntu(linux)系统的一些经验•一些具有机器人操作系统(ROS/ROS2)的经验•知识是面向对象的编程语言(例如,python,C ++,bash脚本)将是有利的•自我指导且能够在不进行监督的情况下进行,并且有能力进行监督•充满活力和新的项目•愿意与书面沟通•愿意•dival distal•dival dival dival dival dival dival divalsmot地
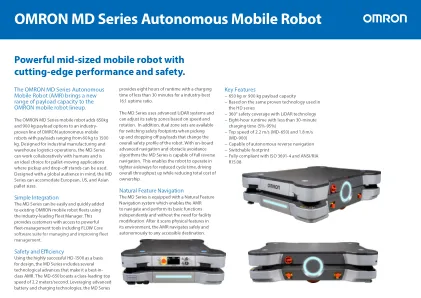
Omron MD系列自动移动机器人
MD系列使用高级LIDAR系统,可以根据速度和旋转来调整其安全区域。此外,双重区域集可用于切换安全占地面积,并放下有效载荷,以改变机器人的整体安全性。使用车载高级导航和避免障碍算法,MD系列能够完全反向导航。这使机器人能够在更严格的道路上运行,以减少周期时间,从而推动整体吞吐量,同时降低总拥有成本。

合作移动机器人技术:前因和方向∗
产生对社会科学(组织理论,经济学,认知心理学)和生命科学(Theo-Wentical Biology,Animal Senology)的基本问题的见解。对多机器人系统的研究自然扩展了对单机器人系统的研究,但也是一项纪律:多机器人系统可以完成没有任何一个机器人可以完成的任务,因为最终的机器人最终,无论有多么能力,在空间上都受到限制。多机器人系统也与其他分离的系统不同,因为它们具有隐式的“现实世界”环境,这比分布式系统环境的传统组件(即计算机,数据库,网络,网络,网络,网络,网络)更困难地模型和理由。术语集体行为通常表示具有多个代理的系统中代理的任何行为。合作行为,是
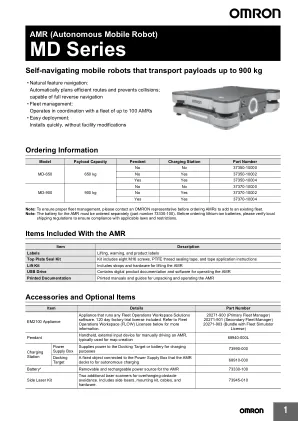
AMR(自动移动机器人)-MD系列
Omron进一步否认基于产品侵权或其他任何知识产权权利的索赔或费用的所有类型的保证和责任。(c)买家补救措施。omron的唯一义务应在Omron的当选中,以(i)替换(最初以负责删除或替换的劳动力费用的形式替换)非竞争产品,(ii)维修非兼容的产品,或(iii)将或(iii)偿还或信用购买者的价格等于非竞争产品的购买价格等于非竞争产品的购买价格;前提是,在任何情况下,除非Omron的分析确认产品的正确处理,存储,安装和维护,否则Omron均不应对产品的保修,维修,赔偿或任何其他索赔或费用负责,并且不受污染,滥用,滥用,滥用,滥用或不适当的修改。买方退货的任何产品都必须在发货前以书面形式批准。Omron公司不应对使用产品的适用性或不合适性或与任何电气或电子组件,电路,系统组件或任何其他材料或物质或物质或环境结合使用的结果负责。任何建议,建议或以书面形式提供的建议,建议或信息,不应被解释为上述保修的修正案或补充。