XiaoMi-AI文件搜索系统
World File Search System移动机器人
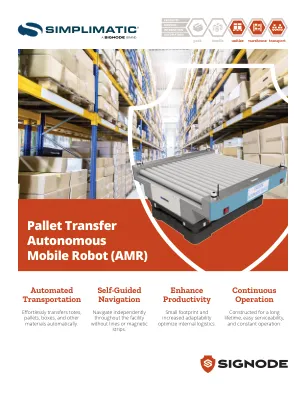
托盘转移自主移动机器人(AMR)
简单托盘转移AMR是带有传输输送机的完全集成的自主移动机器人(AMR)。它有助于在现有设施中轻松整合自动转移托盘和盖洛德。该系统是将其停靠到线路辊或阻力链传输输送机的结束并自动传输负载的。miR1350机器人在无线或磁条的无助于整个设施中自动导航,并将在路径中的障碍物周围积极地重新安置自己。此AMR可以使用Mircharge 48V充电单元进行<10%的停机时间运行。
移动机器人系统服务级别II
代码基本能力400311210参与工作场所沟通400311211在团队环境中工作400311212求解/解决一般工作场所问题400311213制定职业和生活决策400311214 400311214有助于工作场所创新有助于00311215 00311215目前的相关信息和健康的行动400311216练习400311216练习400311216练习400311216练习400311216练习400311216 practices in the workplace 400311218 Practice entrepreneurial skills in the workplace Code COMMON COMPETENCIES CS-ELC311205 Use hand tools CS-ELC311201 Perform mensuration and calculation CS-ELC311202 Prepare and interpret technical drawing CS-ELC311204 Apply quality standards CS-ELC311203 Perform computer operations CS-ELC311206 Terminate and connect electrical wiring and电子电路CS-ELC311209测试电子组件代码核心竞争力AB-ELC1381300311301安装移动机器人AB-ELC13813003113132测试移动机器人系统AB-ELC138130031131303服务和维持该资格的人,并维持有资格的人是一个有效的人。

使用移动机器人自动映射Rumex
这项工作介绍了使用小型移动机器人使用用户界面绘制草地上的Rumex植物的ROS软件包的核心想法和实施。这些贡献包括一个自主导航和映射框架以及最先进的Yolov8神经网络的应用,用于在新录制的数据集中训练的Rumex检测。这项工作中提出的导航和映射框架已成功应用于最近开发的移动机器人B型路径计划算法(Nguyen等,2023)。

由护理人员远程操作的移动机器人的自动化水平
老年护理人员可以从远程呈现机器人中受益,远程呈现机器人使他们能够远程执行各种任务。为了让非技术用户有效高效地操作此类机器人,重要的是检查机器人系统的自动化水平 (LOA) 是否以及如何影响其性能。这项工作的目的是为老年护理的移动机器人远程呈现 (MRP) 系统开发合适的 LOA 模式,并评估它们对用户在两个不同任务复杂度级别的表现、工作量、环境意识和可用性的影响。为此,在 MRP 平台上实施了两种 LOA 模式:辅助远程操作(低 LOA 模式)和自主导航(高 LOA 模式)。该系统在一项有 20 名参与者的用户研究中进行了评估,他们以护理人员的角色,在类似家庭的环境中导航机器人执行控制和感知任务。结果表明,当任务复杂度较低时,高 LOA 下的性能有所提高。但是,当任务复杂度增加时,较低的 LOA 可以提高性能。在工作量和情境意识的结果中也观察到了这种相反的趋势。我们从 LOA 对用户对自动化的态度的影响以及对可用性的影响方面讨论了结果。

用于教育和研究目的的移动机器人的设计
摘要:在教授控制理论,数字信号处理,电源电子和数字电子等电气工程主题中,机器人技术的使用越来越多。移动机器人在学术研究中也广受欢迎,尤其是在涉及轨迹追踪机器人,检查机器人和线路追随者机器人的项目中。本文旨在展示能够充当全向或差分机器人的移动机器人的开发和组装。它突出了差异机器人运动学的重要性,其应用以及其对教育和研究努力的适用性。恢复:o uso Crescente de Rob´otica no Ensino de egnenharia el'etrica,Como teoria de Contole,Processamento Digital de Sinais,Eletretwonicoonica de Potetcoutica dePot来Eletretucia e eltret eletret eletretwonica digital,'e not'e vavel。os robˆos m´oveis tamb´em est〜ao ganhando poculidade na pesquisa adactemica,especialmente em projetos envolvendo envolvendo robˆos de rastreamento de trajet'oria,robˆos de inspeemc〜about e inspemc〜ao e ob从robˆos seguidores seguidores de linha。este artigo tem como objetivo mostrar o desenvolvimento e Montagem de um robˆo m ovel capaz de funcionar como um robˆo omnidireciartion ou diferencial diferencial。ele destaca a intivucia divenencial divencial divenencial,suas aplicaK〜oes e sua equaequapequa报

自动移动机器人的凉亭测试自动化车辆
在这项研究中,开发了一种模拟测试自动化工具,以衡量自动移动机器人,尤其是本地规划人员的性能。车辆允许在3维的凉亭模拟环境中创建不在环境图上的意外障碍,该环境的物理电动机可以一一以所需的尺寸和随机位置模仿现实世界,然后将需要新的环境数量的新环境数量。最后,在每个环境中创建的每个多余环境中,它在每个环境中运行模拟,以测试它是否可以克服障碍物从起点到终点,直到到达终点并在记录文件中运行其成功指标。使用不同的本地规划人员重复相同的模拟时,获得了必要的数据以比较性能指标。测试自动化工具而开发的本地规划算法算法的优缺点,并且我们的发展的缺点和缺点已经揭示了我们的改进。

自动移动机器人绝对量子重力计
多亏了量子技术的进步,Exail能够在10-8 m/s2的水平下提供可旋转的可运输量子传感器测量重力。绝对量子重力计(AQG)测量真空中自由落体测试质量的加速度:精确监测激光冷却原子合奏的弹道自由落体,然后推断重力加速度。这项技术是国际重量和系列局(BIPM)宣布的弹道自由落体方法之一,作为测量重力的官方主要方法。

rrt- dijkstra:改进的移动机器人计划算法
摘要:近年来,碳纳米管(CNT)已作为材料出现,这些材料经常用于制备具有导电或高级介电特性的聚合物纳米复合材料,因为它们的独特特性(包括高温和电导率),包括高度和稳健的材料,具有很高的长度至直径比例。但是,在使用这些材料的聚合物纳米复合材料制备过程中,遇到了一些问题。主要问题之一是,在准备这些导电材料或将它们添加到聚合物中后,由于它们的导电结构,它们倾向于聚集,形成团聚。因此,在这项研究中,首先,多壁碳纳米管(MWCNT)用多苯胺(PANI)的导电形式(随后,聚(Dimethyl Siloxane)(PDMS)聚合物聚合物纳米复合膜功能化,具有不同浓度的多型多壁碳Nanotubes的浓度。然后,表征了膜的结构,形态,电和介电特性。仅添加了1.5%的PANI-CNT,在1 Hz时,PDMS的介电常数增加了47倍。此处介绍的介电膜可用于电容器,柔性电子,介电弹性体和人造肌肉应用。关键字:碳纳米管(CNTS),导电聚合物,介电,聚苯胺(PANI),聚合物纳米复合材料,聚(二甲基Siloxane)(PDMS)

创新的大型移动机器人用于开创性研究
创新的大型移动机器人用于开拓性研究,高度灵活的工业机器人系统为在亚洲RWTH亚太地区的WZL中汇集未来的新可能性为制造公司的状况变化所致,例如产品和变化的多样性,熟练的工人的变化,不足的工人和不确定的供应链,对灵活的组装系统的需求增长。生产计量和质量管理主席正在积极推动无线移动组装系统(LMA)领域的研究。lmas的特征是放弃了单个组装系统的空间和时间刚性链,可以(部分)在干净的地板附件后(部分)动员生产量。在LMA中,自动移动机器人(AMR)和自动驾驶移动操纵器(AMM)在接管运输任务和AMM的情况下发挥了至关重要的作用,甚至执行各种组装步骤。WZL的创新大型移动机器人可以灵活地操纵重型有效载荷,并具有提高制造公司生产率的潜力,尽管情况发生了变化。

增强现实辅助校准移动机器人数字孪生
摘要:在这个全球化和数字化的时代,工业正在从物理空间信息流向虚拟和物理空间之间的双向通信发展。本研究旨在解决的挑战是:“虚拟系统如何适应影响工业维护运营动态的物理信息空间不断变化的条件?”。本文介绍了一种增强现实 (AR) 辅助数字孪生 (DT) 解决方案,可用于校准维护环境中的移动机器人。该 DT 解决方案通过使用历史数据作为输入为用户提供预测移动机器人电池电量的能力,并使用 AR 设备作为显示此数字数据的媒介为用户提供移动机器人运动的视觉表示,从而实现该解决方案。总体而言,试验演示成功实施了使用 AR 辅助校准移动机器人的 DT。因此,该 DT 解决方案可以应用于工业环境的细分领域。通过预测电池电量,用户可以知道移动机器人何时电量耗尽,从而可以在召回充电之前最大限度地利用它。这将提高移动机器人部署调度的准确性,最大限度地提高机器人的利用率,并长期降低移动机器人的运行成本。