XiaoMi-AI文件搜索系统
World File Search System立体视觉

9的立体视觉和结构
上一章在场景中的一个点P的位置(在世界框架坐标p w)与像素坐标中的相应点P之间建立了数学关系,该点坐标被投影到相机的图像平面上。这种关系是基于针孔摄像机模型得出的,并且需要有关相机内在和外在参数的知识。尽管如此,即使在所有这些相机参数都知道的情况下,仍然不可能用单个图像重建P的深度(没有其他信息)。但是,在机器人技术的背景下,通过计算机视觉进行有关机器人环境结构的3 d信息通常是一项非常重要的任务(例如,避免障碍物)。因此,本章介绍了使用相机收集3 D信息的两种方法,即Motion 1,2的立体视觉和结构。1 R. Siegwart,I。R。Nourbakhsh和D. Scaramuzza。自动移动机器人简介。麻省理工学院出版社,2011

具有立体视觉应用的迭代图像注册技术
图像注册在计算机视频中找到了多种应用,例如与立体视觉,模式识别和运动分析的图像匹配。不断增加,现有的图像注册技术往往是昂贵的。此外,它们通常无法处理图像的旋转或其他扭曲。在本文中,我们提出了一种新的图像注册技术,该技术使用空间强度梯度信息来指导搜索最佳匹配的位置。通过考虑有关图像的更多信息,该技术能够找到与图像比较少得多的两个图像之间的最佳匹配,这些技术比以某种固定顺序检查了注册位置的技术要少得多。我们的技术利用了以下事实:在许多应用中,这两个图像已经在近似注册中。可以将此技术推广以处理图像的任意线性扭曲,包括旋转。
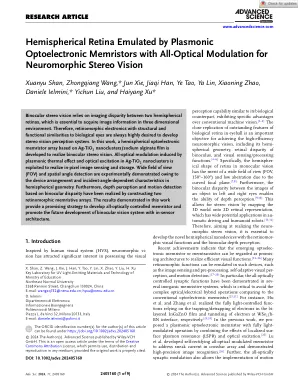
半球视网膜由等离子光电子复制器模拟,并具有全光调制的神经形态立体视觉
双眼立体视觉依赖于两个半球视网膜之间的成像差异,这对于在三维环境中获取图像信息至关重要。因此,与生物眼的结构和功能相似性的视网膜形态电子始终非常需要发展立体视觉感知系统。在这项工作中,开发了基于Ag-Tio 2纳米簇/藻酸钠纤维的半球光电磁带阵列,以实现双眼立体视觉。由等离子热效应引起的全光调制和Ag-Tio 2纳米群体中的光激发,以实现像素内图像传感和存储。广泛的视野(FOV)和空间角度检测是由于设备的排列和半球形几何形状的入射角依赖性特征而在实验上证明的。此外,通过构造两个视网膜形态的恢复阵列,已经实现了基于双眼差异的深度感知和运动检测。这项工作中证明的结果提供了一种有希望的策略,以开发全面控制的回忆录,并促进具有传感器内架构的双眼视觉系统的未来发展。

太空探索的计算机视觉
摘要 — 可以说,我们生活的时代是新太空时代的开端。当所有主要的私营和公共太空部门都在竞相成为第一个登陆火星的人时,星际任务就变得至关重要。不仅火星,木卫二和金星也被认为是生命的家园。自主性是实现这些星际任务目标的基本部分。深度学习和计算机视觉可用于实现航天器的自主性。本文讨论了计算机视觉在太空应用中的作用以及计算机视觉在火星探索中的进展。它还总结了 NASA MER 任务中使用的立体视觉算法,这是计算机视觉在太空探索中的典范。关键词 — 航天器对接、轨道机动、立体视觉
艾瑞斯:学生建造的机器人探测车将用于月球探测
除了这次任务之外,惠特克表示,其他几项创新也有可能改变机器人目前探索太阳系的方式。目前,探测器使用立体视觉来探测地形危险。惠特克表示,如果激光测距技术(称为 Lidar)可以小型化以适合机器人,那将是一个“突破”。
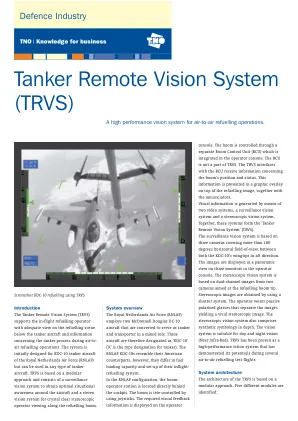
油罐车远程视觉系统
控制台。吊杆通过集成在操作员控制台中的单独吊杆控制单元 (BCU) 进行控制。BCU 不是 TRVS 的一部分。TRVS 与 BCU 接口接收有关吊杆位置和状态的信息。此信息与信号器一起显示在加油图像顶部的图形叠加层中。视觉信息通过两个视频系统、一个监视视觉系统和一个立体视觉系统生成。这些系统共同构成了“加油机远程视觉系统”(TRVS)。监视视觉系统基于三个摄像头,覆盖超过 180 度的水平视野,位于 KDC-10 的两个翼尖之间,在后方。图像以全景视图显示在操作员控制台的三个监视器上。立体视觉系统基于两个瞄准加油杆尖端的摄像机的双通道图像。立体图像是通过使用快门系统获得的。操作员佩戴被动偏光眼镜,将图像分开,从而产生生动的立体图像。立体视觉系统还包括深度合成符号。该视觉系统适用于白天和夜间视觉(近红外)。TRVS 已被证明是一种高性能视觉系统,已在多次空对空加油试飞中展示了其潜力
21 世纪地理空间技术与应用的追求
资格:a) 工程学任何分支的工学学士/理学士或建筑学学士,或 b) 农业/大气科学/植物学/气候学/化学/计算机应用/计算机科学/灾害管理/电子学/环境科学/渔业/林业/地理/地质学/地球物理学/地理信息学/GIS/信息科学/数学/气象学/海洋学/物理学/遥感/土壤科学/统计学/城镇规划/动物学/相关学科的硕士学位。c) 应聘者必须具有立体视觉和正常色觉 • 地理信息学理学硕士学位

基于机器学习和计算机视觉的牛品种识别和活重评估
本研究的目的是使用几种神经网络模型来估算奶牛的长重:卷积人工神经网络用于通过图片识别奶牛并确定其品种,随后通过立体视觉法确定其身体尺寸,随后利用多层感知器根据有关奶牛的品种和尺寸信息估算奶牛的长重。为了更准确地估计动物的身体参数,还使用了 3D 摄像头(Intel RealSense D435i)。应当注意,由于 3D 摄像头的分辨率低,单独使用不会产生良好的效果。因此,使用摄影测量法从不同角度拍摄的奶牛图像来确定奶牛身体参数。通过摄影测量获得了奶牛的肩高(WH)、臀高(HH)、体长(BL)和臀宽(HW)等参数。使用这些参数(输入参数 WH、HH、BL、HW 和输出参数 - LW),开发了基于 ANN 的模型估计。通过分析从不同角度同步摄像机拍摄的动物图像,可以确定奶牛的身体尺寸。首先,在图像中识别奶牛,并使用 Mask-rcnn 卷积神经网络确定其品种。然后通过立体视觉方法确定奶牛的肩高、臀高、身长和身宽,该方法可以获得数字图像中物体的几何参数并进行测量。数字成像和摄影测量处理包括几个完全确定的步骤,可以生成动物身体的三维或二维数字模型。然后将获得的有关物种及其大小的数据输入到预测模型,该模型确定动物的估计体重。
100mm、f/11 Cr系列定焦镜头
高达 2/3 英寸的 C 型接口镜头 高达 750 万像素、2.8µm 像素大小的传感器 我们 C 系列镜头的加固 (Cr) 设计(50g 冲击) 还提供 3.5mm 至 50mm 焦距仪表 (Ci) 版本 TECHSPEC® 紧凑型加固 (Cr) 系列定焦镜头提供稳定的加固功能,保护镜头免受损坏,同时在冲击和振动后保持光学指向和定位。所有单独的镜头元件都粘合到位,以减少图像上的物体偏移。此外,这些镜头具有坚固的机械结构,配有简化的对焦和不锈钢锁定 C 型接口夹。TECHSPEC® Cr 系列定焦镜头非常适合校准成像系统,例如测量和计量、3D 立体视觉、机器人和传感、自动驾驶汽车和物体跟踪。物体到图像的映射是