机构名称:
¥ 1.0
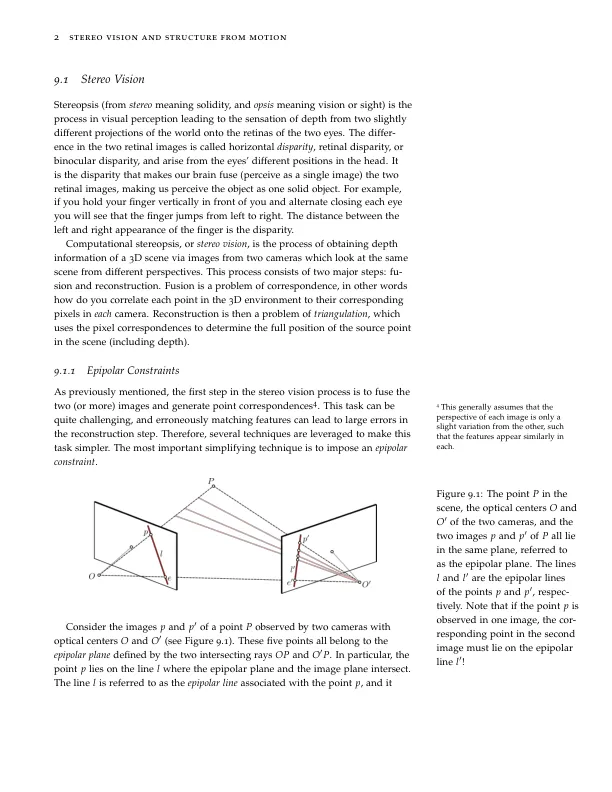
上一章在场景中的一个点P的位置(在世界框架坐标p w)与像素坐标中的相应点P之间建立了数学关系,该点坐标被投影到相机的图像平面上。这种关系是基于针孔摄像机模型得出的,并且需要有关相机内在和外在参数的知识。尽管如此,即使在所有这些相机参数都知道的情况下,仍然不可能用单个图像重建P的深度(没有其他信息)。但是,在机器人技术的背景下,通过计算机视觉进行有关机器人环境结构的3 d信息通常是一项非常重要的任务(例如,避免障碍物)。因此,本章介绍了使用相机收集3 D信息的两种方法,即Motion 1,2的立体视觉和结构。1 R. Siegwart,I。R。Nourbakhsh和D. Scaramuzza。自动移动机器人简介。麻省理工学院出版社,2011
9的立体视觉和结构
主要关键词




相关文件推荐