XiaoMi-AI文件搜索系统
World File Search System纵向

纵向培养的精确切割肺切片作为肺的预测离体模型
探索体内模型的替代方案,本研究验证了精确切割肺切片(PCLS)是可行的肺癌研究的可行的离体平台。我们确定了PCLS的长期活力和结构保存,对于准确的药物反应研究至关重要。使用紫杉醇作为基准药物和一种与免疫疗法结合使用的具有治疗良好的银纳米颗粒,我们对其对PCLS对PCLS的治疗作用进行了开创性的比较分析。结果表明,PCL在体内反应中紧密模仿,表明肿瘤生长抑制作用中的药物疗效可比。这种直接比较不仅证实了PCL在模拟现实结果中的实用性,而且还强调了其在减少动物测试中的潜力。通过为肺癌研究提供可靠,道德和有效的替代方案,PCL可以显着增强临床前研究和药物的开发,这标志着迈向更人性化和代表性的科学研究的关键一步。
患者特定的骨髓瘤疗法的纵向评估
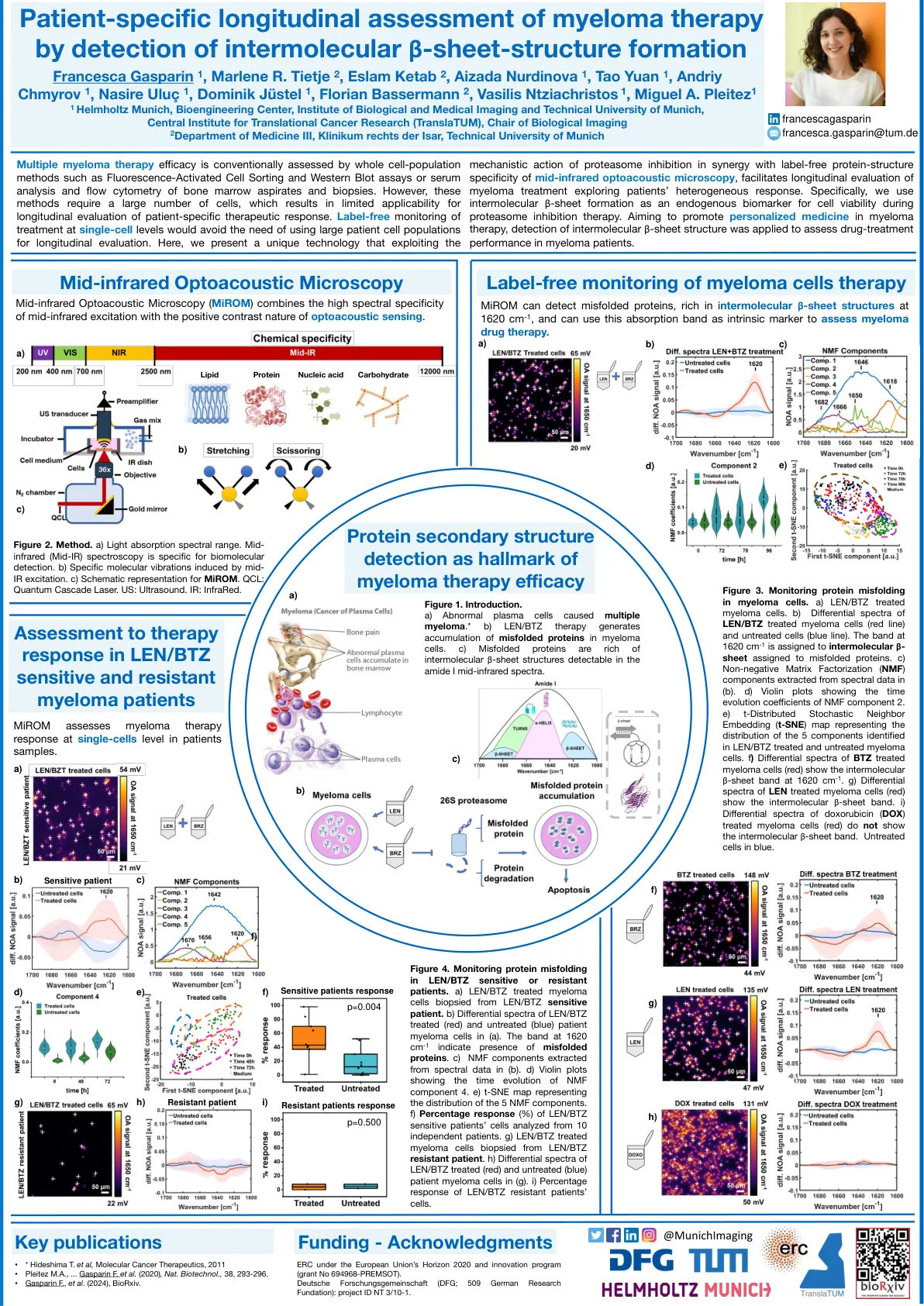
图3。监测骨髓瘤细胞中的蛋白质折叠率错折叠。a)LEN/BTZ治疗的骨髓瘤细胞。b)LEN/BTZ处理过的骨髓瘤细胞(红线)和未处理细胞(蓝线)的差异光谱。在1620 cm -1处的条带被分配给分子间分子β-分配给错误折叠蛋白的表。c)从(b)中的光谱数据中提取的非负矩阵分解(NMF)组件。d)小提琴图显示了NMF组分的时间演化系数2。E)T分布的随机邻居嵌入(T-SNE)图,代表了在LEN/BTZ处理过的5个成分和未经处理的骨髓瘤细胞中鉴定出的5个成分的分布。f)BTZ处理过的骨髓瘤细胞(红色)的差异光谱显示在1620 cm -1时分子间β-菜单带。g)LEN处理的骨髓瘤细胞(红色)的差异光谱显示了分子间β-片带。i)阿霉素(DOX)治疗的骨髓瘤细胞(红色)的差异光谱未显示分子间β-呈带。未处理的细胞为蓝色。

几何特征模脑指纹及其与青少年的纵向关联
(未通过同行评审认证)是作者/资助者。保留所有权利。未经许可就不允许重复使用。该预印本版的版权持有人于2024年8月9日发布。 https://doi.org/10.1101/2024.08.08.607260 doi:biorxiv preprint

与野生动物种群中年龄和衰老有关的纵向肠道微生物组动力学
fi g u r e 1根据(a)寄主时代(b)平均区域质量(c)季节和(d)成年塞舌尔莺的时间中的寄托量(b)平均地区质量(c)季节和(d)时间。PCA排序使用基于中心对数比率(CLR)转换的扩增子测序变体(ASV)丰度计算的Aitchison距离进行。每个点代表一个独特的肠道微生物组样品(n = 273个个体的462个样品)。大钻石代表组质心。为了清楚起见,样品被分为绘制的离散类别:(a)年龄:1-3岁,3-6岁或> 6岁; (b)领土质量:低(下四分之一<17,136),中(四分位数范围)或高(上四分位数> 36,602); (c)季节:专业或小季度; (d)一天中的时间:早晨收集的样本(日出后<6:00 am a am am am a p(日出>日出> 6 h)。主成分1、2、3和4分别解释了肠道微生物组结构变化的10.9%,4.4%,2.3%和1.9%。

使用Brillouin光散射测量的血浆纵向粘度的诊断潜力
许多疾病与血浆粘度(PV)的变化有关。测量这些是耗时的,通常需要大量的血浆。在这里,我们表明布里鲁因光散射(BLS)光谱法(一种探测高频率纵向声学模式的传播和衰减的技术)可以识别出微级别的粘度的变化 - 一秒钟内的粘度 - 大小的体积。这是COVID -19(COV)患者的血浆,该血浆表现出升高的PV。还表明,使用BLS测量的粘度包含其他独特信息,这些信息可以辨别出可能具有诊断价值的悬浮液,这些悬浮液在患有严重疾病进展的COV患者中似乎更存在。

筛查结肠镜检查对温室气体排放的纵向影响
在一年内进行的630万次筛查结肠镜检查可预防十年内的1,134,000个结直肠癌。局部38 3%(434,254),38 8%(440,281)是区域性的,22 9%(259,465)是转移性疾病。预防后的诊断后访问数量最少为I期11,II期为21,第III期25,IV期为20,由诊断,手术评估,化学疗法和监测访问组成。I期筛查预防的访问总数为2,388,397,II期为5,254,421,第三阶段为13,120,369,第IV期为9,210,972。大约3.95亿英里的旅行和158,263吨的二氧化碳,相当于燃烧的1.77亿磅煤炭,收取的190亿智能手机或1800万加仑的汽油消耗,通过筛查得以节省十年。


Covid-19后三年神经肌肉疾病患者的体育活动,纵向调查:隔离的后效应以及返回更健康的生活方式的益处
摘要:锂离子电池(LIBS)通常会呈现几个降解过程,其中包括其复杂的固体电解质相间相(SEI)形成过程,这可能导致机械,热和化学失败。SEI层是在阳极表面上形成的保护层。SEI层允许在阻断电子时移动锂离子,这是防止电池中短路并确保安全操作所必需的。然而,SEI形成机制在消耗电解质物种时会降低电池能力和功率,从而导致材料损失。此外,重要的是要了解电动汽车中使用的LIB的降解反应(EV),旨在建立电池寿命,预测和最大程度地减少材料损失,并建立足够的更换时间。此外,在两个主要降解的主要类别中应用的libs在特定的日历下降和循环降解中应用。文献中有几项有关电池降解的研究,包括不同的降解现象,但是很少研究大型液体的降解机制。因此,本综述旨在对现有文献进行有关LIB降解的系统综述,从而深入了解影响电池降解机制的复杂参数。此外,本综述研究了时间,C率,排放深度,工作电压窗口,热应力和机械应力以及LIBS降解中的副反应的影响。

在光子时间晶体中的纵向光音子,该晶体包含固定
*这两位作者也同样贡献。†hli01@nankai.edu.cn‡jjxu@nankai.edu.cn§boris@physics.technion.ac.ac.il

评估CRISPR-CAS9基因编辑在转移性黑色素瘤中的个性化肿瘤病毒疗法的功效:一项纵向多中心研究
转移性癌是一种侵略性的皮肤癌,由于其高死亡率和有限的补救选择,在治疗方面提出了重大挑战。本文提出了一项纵向多中心研究,旨在估算CRISPR-CAS9基因编辑的效果,以证实转移性癌中的溶瘤传播疗法。该研究旨在评估这种创新方法的安全性,可行性和补救性,该方法结合了基因编辑的完美与溶瘤传播的挑剔性质。该研究的设计涉及保留从多个中心诊断为转移性癌的病例。排泄样本,以识别与投诉相关的特定基因突变。crispr- cas9技术将用于靶向和修改这些可继承的差异,从而增强了溶瘤传染的能力,以专门靶向和破坏癌细胞。修改后的传染病将使用彩色递送样式(类似于肿瘤内注射或全身输注)对案例进行管理。在整个研究中,将进行临床和分子评估,以涵盖治疗反应和隐式副商品。