XiaoMi-AI文件搜索系统
World File Search System线性化

敏捷固定翼无人机的建模与姿态控制...
线性控制方法。一种常见的候选方法是非线性动态逆,它涉及使用微分代数方法将非线性模型转换为完整或部分模型。动态逆的基本原理是使用代数方法的逆变换来消除从输入到输出的非线性(输入/输出线性化),从而获得系统的非线性控制器。这是通过强制稳定的线性误差动力学来实现的。优点是它可以实现简单的设计,不需要繁琐的增益调度,具有易于在线实施的特点,因为它可以产生控制器的“闭式解”,并且保证了误差动力学的渐近稳定性。这种方法的缺点是对建模不准确性很敏感,并且与线性方法不同,这种方法在大多数情况下会得到一个模型相关的控制器。

使用序列空间jacobian解决和估计异质 - 代理模型
6在第6节中,我们提出了一种使用序列空间Jacobians更新猜测的方法。但是,使用此方法获得线性脉冲响应将是重生,因为我们可以直接从雅各布人那里求解这些响应。7我们与所有汇总线性化方法共享该模型不会产生风险溢价的缺点,投资组合选择是不确定的,并且最佳的Ramsey策略是错误的。对于这些应用程序,更高阶段或全局解决方案方法更合适(例如,请参见Fernández-Villaverde,Rubio-Ramírez和Schorfheide 2016。)8在原始的Krusell和Smith(1998)模型中,过渡概率取决于骨料状态,即,P采用p(e,e',z t)形式。我们的方法也可以应用于这种情况(请参阅附录A中的一般公式)。

Endress + Hauser Micropilot FMR 自由空间雷达液位传感器
Endress+Hauser Micropilot FMR10 脉冲雷达液位传感器可为储罐、开放式水池、泵提升站、冷却塔和运河系统中的液体提供可靠、连续、非接触式的液位测量。Micropilot FMR10 可配置为提供 4-20mA 模拟输出,液位最高可达 8 米(26.25 英尺)或 12 米(39.37 英尺)(如果安装了防洪管附件)。Micropilot FMR10 的配置和操作可通过其蓝牙无线技术接口和 Endress+Hauser SmartBlue 移动应用程序完成,该应用程序包括线性化功能,可将测量值转换为任何长度、重量、流量或体积单位。还可以使用 SmartBlue 显示和记录过程的包络曲线。Micropilot FMR10 PVDF 传感器主体

使用铅控制飞机的俯仰... - Ijcrt.org
1 电气与电子工程,1 圣王工程与技术学院,帕姆帕库达,喀拉拉邦,印度 ______________________________________________________________________________________________ 摘要:本文介绍了使用超前补偿器和模糊控制器对纵向飞机进行控制。飞行系统设计需要线性化的纵向动力学数学模型。超前补偿器具有超前网络的特性,可改善系统的瞬态响应。为了控制俯仰角,使用 Matlab - simulink 模型来调整补偿器,使用 Mamdani 型模糊逻辑控制器(SNDeepa 和 Sudha G.2014)通过模拟选择适当的模糊规则来调整参数。模拟结果以时域规范呈现,并基于阶跃响应分析性能。进行比较以确定哪种控制策略对所需俯仰角做出更好的响应。索引术语 - 模糊控制器、超前补偿器、纵向动力学、飞机。 ______________________________________________________________________________________________

DNA组装与合成生物学
用户友好的DNA工程方法可以实现多个PCR片段组件,核苷酸序列改变和定向克隆。靶DNA分子和克隆载体由PCR产生,而相邻片段之间具有6-10个同源性碱基。pCR引物包含一个二氧化神经菌残基(DU),该残基(DU)在同源性区域的3´末端,可以容纳核苷酸取代,插入和/或缺失。然后使用引物用离散的重叠片段扩增向量和靶DNA,这些片段在两端都包含DU。随后使用用户酶对PCR片段进行处理会在每个DU上产生一个单个核苷酸间隙,从而导致PCR片段侧翼,侧面有SS延伸,使定制DNA分子的无缝和方向组装成线性化的载体。多碎片组件和/或各种诱变变化。

传感器 - 语义学者
摘要:网络化多传感器用于解决机动目标跟踪问题。为避免非线性动态函数的线性化,获得更准确的机动目标估计,提出了一种用于机动目标跟踪的自适应信息加权协同滤波器。利用无迹变换计算伪测量矩阵,以利用测量的信息形式,这是协同迭代所必需的。为提高机动目标跟踪精度并在整个网络的每个传感器节点中获得统一的估计,利用自适应当前统计模型来更新估计,并在各个动态模型的相邻节点之间应用信息加权协同协议。基于多个模型的后验概率,通过对模型条件估计的加权组合来获得每个传感器的最终估计。实验结果表明,所提算法在跟踪精度和全网估计一致性方面具有优异的性能。
传感器 - 语义学者
摘要:网络化多传感器用于解决机动目标跟踪问题。为避免非线性动态函数的线性化,获得更准确的机动目标估计,提出了一种用于机动目标跟踪的自适应信息加权协同滤波器。利用无迹变换计算伪测量矩阵,以利用测量的信息形式,这是协同迭代所必需的。为提高机动目标跟踪精度并在整个网络的每个传感器节点中获得统一的估计,利用自适应当前统计模型来更新估计,并在各个动态模型的相邻节点之间应用信息加权协同协议。基于多个模型的后验概率,通过对模型条件估计的加权组合来获得每个传感器的最终估计。实验结果表明,所提算法在跟踪精度和全网估计一致性方面具有优异的性能。

自主总线轨迹跟踪系统的强大无模型自适应迭代学习控制
摘要在这项工作中提出了一种强大的无模型自适应迭代学习控制(R-MFAILC)算法,以解决横向控制自动驾驶总线的问题。首先,根据自主总线的周期重复工作特性,利用了迭代域中使用的一种新型的动态线性化方法,并给出了具有伪梯度(PG)的时变数据模型。然后,R-MFAILC控制器的设计具有建议的自适应衰减因子。所提出的算法的优势在于R-MFAILC控制器,该控制器仅利用了调节实体的输入和输出数据。此外,R-MFAILC控制器具有很强的鲁棒性,并且可以处理系统的非线性测量干扰。在基于卡车SIM模拟平台的模拟中,验证了所提出的算法的有效性。使用严格的数学分析来证明所提出算法的稳定性和收敛性。
调查帕金森氏病和癌症之间共同遗传危险因素
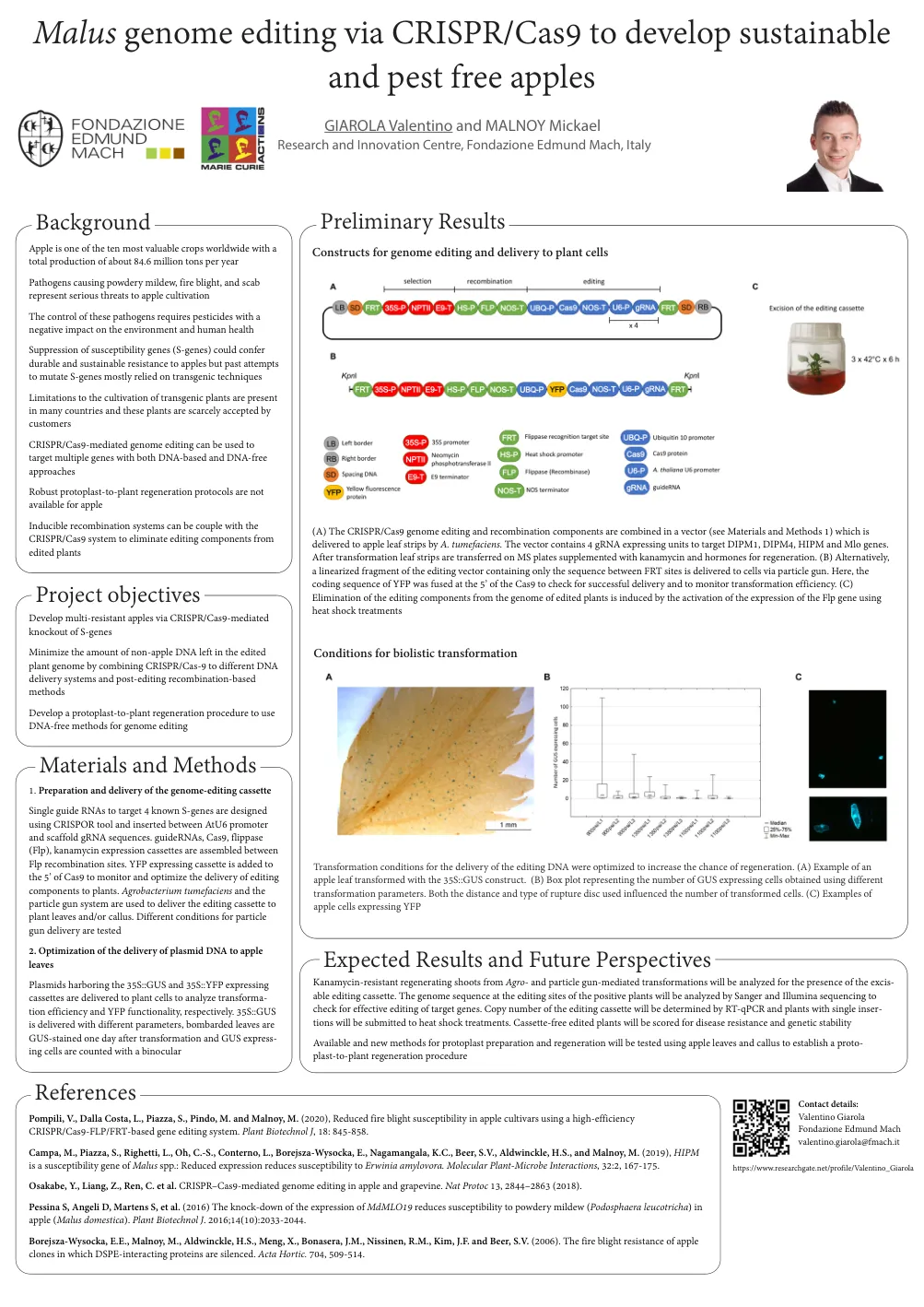
(a)CRISPR/CAS9基因组编辑和重组成分组合在矢量中(请参阅材料和方法1),该材料和方法1)由A. tumefaciens递送至苹果叶条。该载体包含4个GRNA表达对靶DIPM1,DIPM4,HIPM和MLO基因的单位。转化后,将叶条带在补充卡纳米霉素和激素以进行再生的MS板上转移。(b)另外,通过粒子枪仅包含FRT位点之间的序列的编辑矢量的线性化片段。在这里,YFP的编码顺序在CAS9的5'上融合在一起,以检查成功交付并监视转换效率。(c)消除从编辑植物基因组中的编辑成分是通过热休克处理的激活FLP基因的表达