XiaoMi-AI文件搜索系统
World File Search System续航时间

测绘数字化遥控技术研究...
遥感飞行平台分为卫星遥感和航空遥感,过去的航空遥感平台主要是有人机。20世纪90年代,随着电子技术的飞速发展,小型无人机在遥控、续航时间、飞行品质等方面有了明显的突破,成为近来兴起的新型遥感手段,并在遥感界被普遍认为具有良好的发展前景。与人机相比,无人机的优势主要表现在:一是机动性极高,所有设备加起来也就100多公斤,在机动速度、机动范围、机动条件等方面,是任何飞机都无法比拟的;二是环境适应能力强,不需要专门的起降场地,飞到哪里对气象条件的要求很低,优越的低空性能使得云中作业变得轻而易举,从而大大提高工作效率;三是经济性极佳,飞机购买价格便宜,一般公司都能负担得起,使用成本低,而且不需要有人值守,用户的安全压力大大减轻。从飞行器的性能上看,无人机与人机的一个重要区别在于,无人机在视距内飞行,完全由自动驾驶仪按预设程序飞行,无法根据实际飞行情况进行无人干预,体积小,可装载空间和重量十分有限,只能装载小型普通传感器。第三,无人机飞行时受气流扰动而引起飞行状态偏差,主要靠飞机自身的飞行稳定性来恢复,因此存在明显的速度慢。以上特点直接影响航拍质量,用无人机航拍时,往往出现图像质量不高、重叠误差大、漏拍等现象。
TIDA-010247 - 高精度电池管理单元...
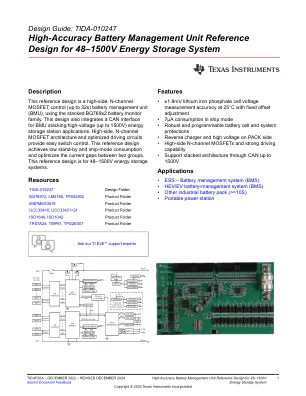
电池组由串联和并联的电池单元组成,是组成 ESS 的基本模块。由于重量限制和更长的续航时间需求,电池单元化学成分正在从铅酸电池转变为锂离子、锂聚合物或磷酸锂离子 (LiFePO4) 类型,并且电池组电压正在从 24V 或 48V 转变为 96V 或 192V,甚至更高。这些电池化学成分在体积和重量能量密度方面都很好。虽然这些电池化学成分提供了高能量密度,从而具有体积和重量更小的优势,但这些电池产品存在安全问题,需要更准确和更复杂的监控和保护。这些问题包括电池欠压 (CUV) 和电池过压 (COV)、过热 (OT)、充电过流 (OCC) 和放电过流 (OCD) 以及短路放电 (SCD),所有这些都会加速电池性能下降并可能导致热失控和爆炸。因此,必须及时监测电池组电流、电池温度和每个电池电压,以防出现异常情况。必须保护电池组免受所有这些情况的影响。始终需要良好的测量精度,尤其是电池电压、电池组电流和电池温度。精确的保护和电池组充电状态 (SoC) 计算必不可少。由于电压平坦,这对于 LiFePO4 电池组应用尤其如此。电池供电应用的另一个重要特性是电流消耗,尤其是在运输模式或待机模式下。较低的电流消耗可节省更多能源,并提供更长的存储时间,而不会使电池过度放电。

适用于旧款摩托车的智能混合动力技术
混合动力滑板车是一种结合了两种动力的滑板车:电动机和汽油发动机。电动机由电池供电,电池可以通过将滑板车插入电源插座进行充电;而汽油发动机则在电池电量低或滑板车行驶速度更快时提供额外动力。混合动力滑板车的设计比汽油动力滑板车更环保、更省油。由于使用电动机和电池,它们的输出功率比单一汽油发动机更低,从而为乘客节省了开支。随着人们寻求更好、更环保的交通方式,混合动力滑板车越来越受欢迎。对于交通拥堵和空气污染严重的城市地区来说,它也是一种理想之选。总而言之,混合动力滑板车是一种前景光明的新型交通工具,兼具便捷性、耐用性和成本节约,是许多骑行者的理想选择。我们将一辆汽油发动机驱动的本田Active滑板车改装成了混合动力车。车辆轮胎中安装了直流无刷轮毂电机,并使用锂离子电池为电机供电。 Bijlee Bike 的混合动力改装套件可用于将车辆改装为混合动力车。这不仅对环境有害,还会影响个人健康。尽管电动滑板车是减少排放的一步,但它们仍存在诸多局限性,而且充电时间较长。因此,我们需要一种更好、更高效的交通工具,能够兼具电动滑板车和燃气滑板车的优势。混合动力滑板车可以通过提供更多更快的续航时间来解决这些问题,同时减少排放并促进环境可持续发展。
C172N-1977-POH.pdf - 贝克斯菲尔德飞行俱乐部
速度:海平面上升 125 节,8000 英尺处最小燃油功率 22 节 巡航定速:建议使用轻混合油,并预留发动机启动、滑行、起飞、爬升的燃油余量,在 45 伏交流电源下有 45 分钟的储备油量。8000 英尺处最小燃油功率 航程 485 海里(0.6 英里/小时) 续航时间 4.1 小时 8000 英尺处最小燃油功率 240 节。航程 630 海里 50 加仑可用飞行时间 5.3 小时 10,000 英尺时的最大航程 575 海里 50 加仑可用飞行时间 5.7 小时 10,000 英尺时的最大航程 ?50 海里 50 加仑可用飞行时间 ?.4 小时 海平面爬升率 ??0 FPM 服务 CEXLII,TG 14,200 英尺 起飞性能:地面滑跑 80 英尺 越过 50 英尺障碍物的总距离 1440 英尺 失速性能:地面滑跑 520 英尺 越过 50 英尺障碍物的总距离 1250 英尺 失速速度 (CAS):打开电源,关闭电源 50 节降落,关闭电源。44 节 最小航速 2300 磅 标准空重: Skyhawk。1379 磅 Skyhawk II。1403 磅 滑行满载重量: Skyhawk。921 磅 Skyhawk II。897 磅 载重量限额 120 磅 机舱装载量:磅/平方英尺 13.2 功率装载量:磅/马力 14.4 英尺容量:标准油箱总计 43 加仑。大型油箱 54 加仑。 orl- 容量 6 QTS E!{GII\-E: Avco Lycoming O-320-H2AD 160 BHP,2700 RPM 螺旋桨:固定螺距。直径 ?5 英寸。
InstantEye Mk-3 GEN4-D1 - 民航巡逻
InstantEye Mk-3 GEN4-D1 sUAS 是高性能、低成本、自主飞行系统系列的一部分,可由单个操作员手动发射/回收。GEN4-D1 利用经过实战检验的 GEN3 和 GEN4 系统的易用性和生存能力,结合加密的软件定义无线电,提供几乎无声、小型、按需、本地(约 3000 米)态势感知。作为士兵的最终用户设备,InstantEye Mk-3 GEN4-D1 可增强部队保护并降低其范围内每个人的操作风险。该飞机集成了万向架电光 (EO) 和长波红外 (LWIR) 摄像头。飞行时,该飞机的旋翼跨度较小,非常适合用作进入机器人,为没有 GPS 的空间提供第一双眼睛。该系统通常具有大约 30 分钟的续航时间,受天气条件(尤其是风、热和湿度)和使用的任何有效载荷的影响。该系统能够在恶劣天气下飞行,包括风速高达 35 英里/小时、大雨/大雪、海拔高达 12,000 英尺,温度在 -10°F 至 120°F 之间。该系统的自动驾驶仪、飞行控制和人机界面源自经过实战验证的 InstantEye Mk-2 GEN3 和 Mk-2 GEN4 系统。这些早期系统有数千小时的飞行记录,拥有陆军特种作战航空司令部的适航许可,并被陆军总部授权部署和使用。InstantEye Mk-3 GEN4-D1 (MIL) 系统由以下元素组成(图 1): • 飞机,InstantEye Mk-3 GEN4-D1 (MIL) – 数量 2 • 双手控制器 (GCS-D) D1 (MIL) – 数量 1 • 加固地面控制系统 (GCS) 显示器 (8J) – 数量 1 • 带 USB 主机适配器的 GCS 电缆 (8J) – 数量 1 • 运输(硬)箱,InstantEye Mk-3 GEN4-D1 系统 – 数量 1 • 软包,InstantEye Mk-3 GEN4-D1* – 数量 1 • 电池,1.3 Ah- 数量 2 /5.7V – 数量 2 • 电池充电器,InstantEye Mk-3 GEN4-D1 – 数量 1 • BA-5590 和 BB-2590 的充电器接口电缆, 4 针 – 数量 1 • 备件套件,InstantEye Mk-3 GEN4-D1 – 数量 1 • InstantEye Mk-3 GEN4-D1 sUAS 技术手册 (MIL) – 数量 1
能见度和降雪强度之间的关系
序言 根据与加拿大运输部运输发展中心签订的合同以及与联邦航空管理局的合作,APS Aviation Inc. (APS) 开展了一项研究计划,旨在推进飞机地面除冰/防冰技术。APS 测试计划的具体目标如下: • 为所有新合格的除冰/防冰液开发保持时间数据; • 评估拟议航空航天标准 5485 中规定的实验室霜冻耐久性测试参数; • 评估前几个冬季的天气数据,以确定适合评估保持时间限制的一系列条件; • 进一步评估模拟起飞过程中飞机机翼受污染液体的流量; • 比较在自然雪中和实验室雪中的耐久性; • 比较液体耐久性、保持时间和保护时间; • 比较使用国家大气研究中心热板获得的降雪率和使用速率盘获得的降雪率; • 进一步分析降雪率与能见度之间的关系; • 促进 III 型液体的开发; • 测量使用强制空气辅助系统应用的液体的耐久时间; • 进行探索性研究,包括测量所应用的 IV 型液体的温度、测量滞后时间对保持时间的影响、评估液体覆盖的有效性以及评估滑行时间对除冰保持时间的影响;以及 • 为加拿大运输部提供支持服务。该计划在 2002-03 年冬季代表加拿大运输部开展的研究活动记录在十三份报告中。报告标题如下: • TP 14144E 2002-03 年冬季飞机地面除冰/防冰液保持时间开发计划; • TP 14145E 霜冻耐久时间测试的实验室测试参数; • TP 14146E 冬季天气对保持时间表格式的影响(1995-2003 年); • TP 14147E 2002-03 年冬季飞机起飞测试计划:测试以评估清洁或部分消耗的防冰液的空气动力学损失; • TP 14148E 雪地续航时间测试:2002-03 年室内和室外数据比较; • TP 14149E 飞机防冰液在铝表面的粘附性;
2016 年 6 月 - 国防科学委员会
图 1 国防部正越来越多地在各种系统中使用自主能力。 ........................................................................................................................................... 5 图 2 全球自主初创企业地图(顶部);初创企业机会目标分类(底部) ...................................................................................................................... 7 图 3 机器智能生态系统 ............................................................................................................................. 8 图 4 自主性在国防部的各种重要任务中获得作战价值 ............................................................................. 12 图 5 战斗老兵刷新无人机技能 ............................................................................................................. 18 图 6 “在环”监督为人机合作提供更多机会 ............................................................................................................. 19 图 7 建立对自主系统的适当信任校准 ............................................................................................. 22 图 8 用于系统 V&V 和性能增强的在线处理器 ............................................................................. 34 ........................................................................................................................... 43 图 10 红色框中显示了 Airborg(上中)的能力。无人机的最大起飞总重量与有效载荷(左)和续航时间(右)进行了比较。 .................................................................................................................... 44 图 11 该研究评估了许多候选项目,并选择了那些涵盖了一系列自主优势的项目。 ........................................................................................................... 46 图 12 显示 ARGUS-IS 广域传感器的元素(左),以及可实现机载自主的传感器功能的技术变化速度(右)。 ............................................................................. 50 图 13 显示了查获媒体的示例(左),以及可以实时理解存储信息的工具(中间)。由此产生的社交网络可以揭示实时威胁(右)。 ........................................................................................................... 52 图 14 当前的水雷对抗能力利用两个独立的运载工具——一个用于搜索和探测的自主 UUV(左)和一个由雷区有人驾驶的船只远程操作的运载工具(右)。 ............................................................................................. 56 图 15 级联无人水下运载工具概念图。 .............................................. 62 图 16 使用无人机系统进行有机战术地面车辆支援的概念图。 ........................................... 66 图 17 完全由火蚁建造的木筏,该建筑遵循一些简单的规则,形成一个浮力结构,使蚂蚁能够存活直到到达干燥的陆地。 ................................ 84 图 18 物联网智能对象的数量和类型都在迅速增加。 ........................................................................................................................... 88 图 19 无人机在典型社区中从物联网收集数据的示意图。 ......................................................................................................................... 89 图 20 联合空中任务周期内的 MAAP 团队职责 ............................................................................................. 95
DSBSS15.pdf - 国防科学委员会
图 1 国防部正越来越多地在各种系统中使用自主能力。 ........................................................................................................................................... 5 图 2 全球自主初创企业地图(顶部);初创企业机会目标分类(底部) ...................................................................................................................... 7 图 3 机器智能生态系统 ............................................................................................................................. 8 图 4 自主性在国防部的各种重要任务中获得作战价值 ............................................................................. 12 图 5 战斗老兵刷新无人机技能 ............................................................................................................. 18 图 6 “在环”监督为人机合作提供更多机会 ............................................................................................................. 19 图 7 建立对自主系统的适当信任校准 ............................................................................................. 22 图 8 用于系统 V&V 和性能增强的在线处理器 ............................................................................. 34 ........................................................................................................................... 43 图 10 红色框中显示了 Airborg(上中)的能力。无人机的最大起飞总重量与有效载荷(左)和续航时间(右)进行了比较。 .................................................................................................................... 44 图 11 该研究评估了许多候选项目,并选择了那些涵盖了一系列自主优势的项目。 ........................................................................................................... 46 图 12 显示 ARGUS-IS 广域传感器的元素(左),以及可实现机载自主的传感器功能的技术变化速度(右)。 ............................................................................. 50 图 13 显示了查获媒体的示例(左),以及可以实时理解存储信息的工具(中间)。由此产生的社交网络可以揭示实时威胁(右)。 ........................................................................................................... 52 图 14 当前的水雷对抗能力利用两个独立的运载工具——一个用于搜索和探测的自主 UUV(左)和一个由雷区有人驾驶的船只远程操作的运载工具(右)。 ............................................................................................. 56 图 15 级联无人水下运载工具概念图。 .............................................. 62 图 16 使用无人机系统进行有机战术地面车辆支援的概念图。 ........................................... 66 图 17 完全由火蚁建造的木筏,该建筑遵循一些简单的规则,形成一个浮力结构,使蚂蚁能够存活直到到达干燥的陆地。 ................................ 84 图 18 物联网智能对象的数量和类型都在迅速增加。 ........................................................................................................................... 88 图 19 无人机在典型社区中从物联网收集数据的示意图。 ......................................................................................................................... 89 图 20 联合空中任务周期内的 MAAP 团队职责 ............................................................................................. 95
Surface Pro 10
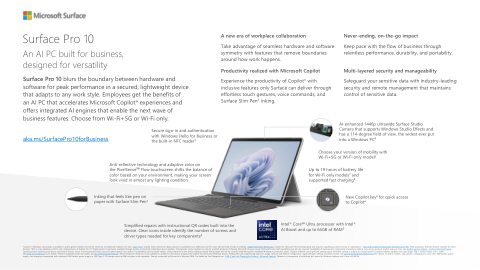
*Windows 中的 Copilot(预览版)在全球部分市场可用,并将随着时间的推移推广到更多市场。了解更多信息。具有商业数据保护功能的 Copilot 可供拥有 Entra ID 和已启用且符合条件的 Microsoft 365 许可证的用户免费使用。1 Copilot for Microsoft 365 单独出售,需要合格的批量许可证或订阅 - Microsoft Copilot for Microsoft 365 | Microsoft 365。2 单独出售。某些功能需要软件许可证。3 NFC 仅适用于仅支持 Wi-Fi 的 Surface Pro 10 配置。4 可通过 Surface Commercial 授权设备经销商获得替换组件。熟练的技术人员可按照 Microsoft 的服务指南在现场更换组件。可能还需要 Microsoft 工具(单独出售)。替换组件和服务选项的可用性可能因产品、市场和时间而异。请参阅 Surface 服务选项 - Surface | Microsoft Learn。打开和/或维修设备可能会造成触电、火灾和人身伤害风险以及其他危险。如果进行 DIY 维修,请务必小心。除非法律要求,否则维修期间造成的设备损坏不在 Microsoft 硬件保修或保护计划的涵盖范围内。5 系统软件会占用大量存储空间。可用存储空间可能会根据系统软件更新和应用的使用情况而发生变化。1GB = 10 亿字节。1TB = 1,000 GB。Surface.com/Storage 了解更多详情。6 功能可用性因市场而异,请参阅 aka.ms/WindowsAIFeatures。当设备上未提供或未启用适用于 Windows 的 Copilot 时,按下 Copilot 键将启动 Windows Search。7 电池续航时间因使用情况、网络和功能配置、信号强度、设置和其他因素而异。有关详情,请参阅 aka.ms/SurfaceBatteryPerformance。8 在特定市场,仅特定配置配备 39W Surface 电源。支持快速充电的是最低 45W 的 Surface 电源或额定功率为 45W 或更高的 USB Type-C PD 充电器(单独出售)。由 Microsoft 于 2024 年 2 月进行的测试。有关快速充电的详细信息,请参阅 - USB-C 和 Surface 快速充电 - Microsoft 支持。9 基于截至 2024 年 2 月 20 日对 Windows 笔记本电脑和 2:1 发布的规格进行比较。

都灵理工大学信息库 - CORE
本文介绍了创新型遥控 ETF 飞艇 1 的技术演示器的地面测试。测试活动旨在验证 ETF 的飞行控制系统,该系统基于推力矢量技术,与飞艇结构一起代表了 ETF 设计的一项重大创新。都灵理工学院航空航天系的一个研究小组与意大利一家小型私营公司 Nautilus 合作,几年来一直致力于 ETF (Elettra Twin Flyers) 的研究。这艘飞艇是遥控飞艇,具有高机动能力和良好的操作特性,即使在恶劣的大气条件下 2 。Nautilus 新概念飞艇具有结构和适当的指挥系统,使飞行器能够在正常和强风条件下进行向前、向后和侧向飞行以及以任何航向悬停。为了实现这些功能,ETF 演示器 3 采用了非常规的架构,该架构基于双船体,带有中央平面外壳结构、螺旋桨、机载电气系统和有效载荷(图 1)。作为主要指挥系统,气动控制面被六个螺旋桨取代,这些螺旋桨由电动机驱动,可在整个飞行范围内控制和操纵飞艇。本文分析了初步测试运行的结果,并将功率需求与专为 ETF 演示器 4 开发的燃料电池系统的性能进行了比较。I 简介 低成本多用途多任务平台 Elettra-Twin-Flyers (ETF) 正在由 Nautilus S.p.A 和都灵理工大学 [1] 合作开发。这是一种非常创新的遥控飞艇,配备了高精度传感器和电信设备。由于其独特的特点,它特别适合内陆、边境和海上监视任务以及电信覆盖范围扩展,特别是在那些无法进入或没有传统机场设施且环境影响是主要关注点的地区。ETF 的特点是机动性强,风敏感度低 [2]。飞行条件包括前向、后向、侧向飞行和悬停,无论是在正常风况下还是在强风条件下。为了实现这些能力,ETF 采用了高度非传统的架构。设计的关键点是创新的指挥系统,它完全基于由电动机驱动的推力矢量螺旋桨,由氢燃料电池供电。ETF 概念来自监视和监控目的。该飞艇设计具有很强的机动性,可以满足高水平的任务要求,可以操作高度专业化的仪器,例如轻型合成孔径雷达 (SAR) 系统或电光 (EO) 红外摄像机或高光谱传感器。为了满足平均监视要求,该系统的最低续航时间为 48 小时,可延长至 72 小时,高度操作范围为 500 至 1500 米。