机构名称:
¥ 1.0
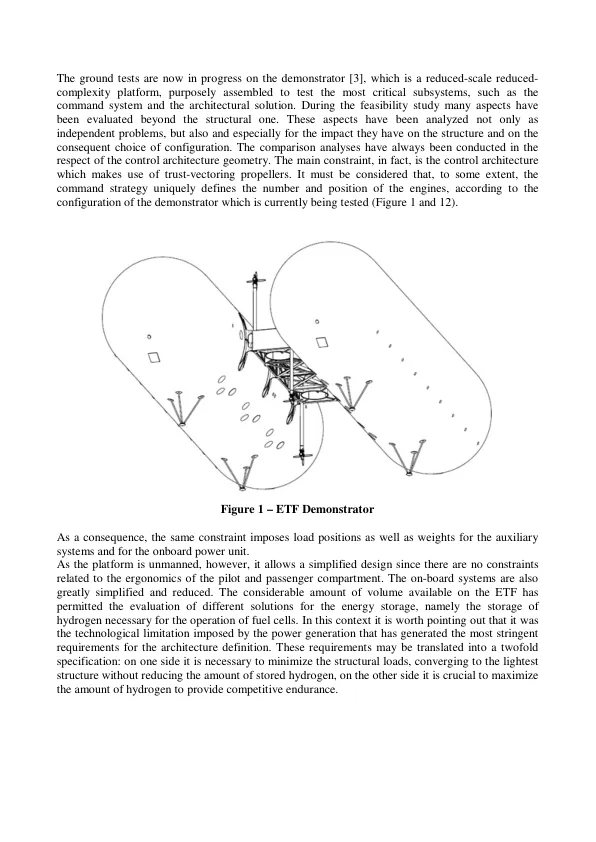
本文介绍了创新型遥控 ETF 飞艇 1 的技术演示器的地面测试。测试活动旨在验证 ETF 的飞行控制系统,该系统基于推力矢量技术,与飞艇结构一起代表了 ETF 设计的一项重大创新。都灵理工学院航空航天系的一个研究小组与意大利一家小型私营公司 Nautilus 合作,几年来一直致力于 ETF (Elettra Twin Flyers) 的研究。这艘飞艇是遥控飞艇,具有高机动能力和良好的操作特性,即使在恶劣的大气条件下 2 。Nautilus 新概念飞艇具有结构和适当的指挥系统,使飞行器能够在正常和强风条件下进行向前、向后和侧向飞行以及以任何航向悬停。为了实现这些功能,ETF 演示器 3 采用了非常规的架构,该架构基于双船体,带有中央平面外壳结构、螺旋桨、机载电气系统和有效载荷(图 1)。作为主要指挥系统,气动控制面被六个螺旋桨取代,这些螺旋桨由电动机驱动,可在整个飞行范围内控制和操纵飞艇。本文分析了初步测试运行的结果,并将功率需求与专为 ETF 演示器 4 开发的燃料电池系统的性能进行了比较。I 简介 低成本多用途多任务平台 Elettra-Twin-Flyers (ETF) 正在由 Nautilus S.p.A 和都灵理工大学 [1] 合作开发。这是一种非常创新的遥控飞艇,配备了高精度传感器和电信设备。由于其独特的特点,它特别适合内陆、边境和海上监视任务以及电信覆盖范围扩展,特别是在那些无法进入或没有传统机场设施且环境影响是主要关注点的地区。ETF 的特点是机动性强,风敏感度低 [2]。飞行条件包括前向、后向、侧向飞行和悬停,无论是在正常风况下还是在强风条件下。为了实现这些能力,ETF 采用了高度非传统的架构。设计的关键点是创新的指挥系统,它完全基于由电动机驱动的推力矢量螺旋桨,由氢燃料电池供电。ETF 概念来自监视和监控目的。该飞艇设计具有很强的机动性,可以满足高水平的任务要求,可以操作高度专业化的仪器,例如轻型合成孔径雷达 (SAR) 系统或电光 (EO) 红外摄像机或高光谱传感器。为了满足平均监视要求,该系统的最低续航时间为 48 小时,可延长至 72 小时,高度操作范围为 500 至 1500 米。
都灵理工大学信息库 - CORE
主要关键词
相关文件推荐