XiaoMi-AI文件搜索系统
World File Search System肌肉组织

简短的交流
样品保存是收集材料(例如野外肌肉组织和血液样本)以及在DNA提取之前运输到实验室时经常面临的问题之一。进行了这项研究,以评估TNS-NACL- EDTA-SDS.EREA)缓冲液的应用,作为一种非晶体组织防腐剂,用于群体,suillus suillus suillus,用于随机扩增的多态性DLA(RAPD)分析。在分析前,将保留的肌肉组织保持在3、6、12和18个月。基因组DNA通过苯酚 - 氯仿法从UP TC成功提取18个月保留的肌肉组织。清晰且同层的RAPD带模式是从保留的石斑鱼组织的基因组DNA中解脱出来的。研究表明,TNS-rea缓冲液是在DNA提取之前保留石斑鱼肌肉组织的方便方法。

神经元和神经胶质细胞
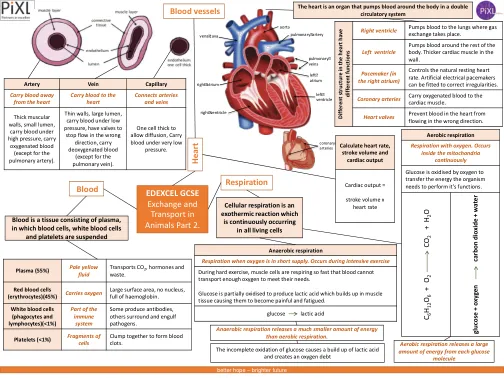
人体由四种组织组成:结缔组织、上皮组织、肌肉组织和神经组织。结缔组织结合、分离和连接其他类型的组织。结缔组织组成人体的骨骼、血液、韧带和肌腱。上皮组织形成皮肤的外层并覆盖体腔,例如消化系统和呼吸系统。肌肉组织形成移动身体、使心脏跳动和将食物通过消化道的肌肉。最后,神经组织构成神经系统,包括由大脑和脊髓组成的中枢神经系统,以及由连接身体肌肉和器官的神经组织组成的周围神经系统。(神经系统的划分将在第 4 章中详细讨论。)

探索脂肪来源的干细胞的抗纤维化作用
摘要:自体脂肪转移在治疗纤维化皮肤疾病,逆转疤痕和僵硬以及改善生活质量方面显示出希望。这些移植物中的脂肪衍生的干细胞(ADSC)被认为对这种作用至关重要,尤其是它们的分泌因素,尽管特定机制尚不清楚。本研究研究了体外纤维化,炎症和低氧性调节后ADSC的转录组变化。高通量基因表达测定在暴露于IL1-β,TGF-β1和缺氧的ADSC上以及胎儿牛血清(FBS)的培养基中。流式细胞术表征了ADSC。RNA-SEQ分析揭示了条件之间不同的基因表达模式。 FBS上调的途径与细胞周期,复制,伤口愈合和骨化有关。 IL1-β诱导的免疫调节途径,包括粒细胞趋化性和细胞因子的产生。 TGF-β1治疗上调伤口愈合和肌肉组织发育途径。 缺氧导致线粒体和细胞活性的下调。RNA-SEQ分析揭示了条件之间不同的基因表达模式。FBS上调的途径与细胞周期,复制,伤口愈合和骨化有关。IL1-β诱导的免疫调节途径,包括粒细胞趋化性和细胞因子的产生。 TGF-β1治疗上调伤口愈合和肌肉组织发育途径。 缺氧导致线粒体和细胞活性的下调。IL1-β诱导的免疫调节途径,包括粒细胞趋化性和细胞因子的产生。TGF-β1治疗上调伤口愈合和肌肉组织发育途径。缺氧导致线粒体和细胞活性的下调。
Mpox 疫苗信息表
不会,Imvamune® 不会像以前的天花疫苗那样留下疤痕,因为它不是通过疤痕接种的。Imvamune® 是通过皮下途径接种的,这意味着针头被放入皮肤下方和肌肉组织上方的脂肪组织中。其他疫苗,如麻疹腮腺炎和风疹 (MMR) 也是通过这种方式接种的。Imvamune® 有副作用吗?
Epi-321-A-Novel-epbepenetic-Gene-gene-for-fshd- ...
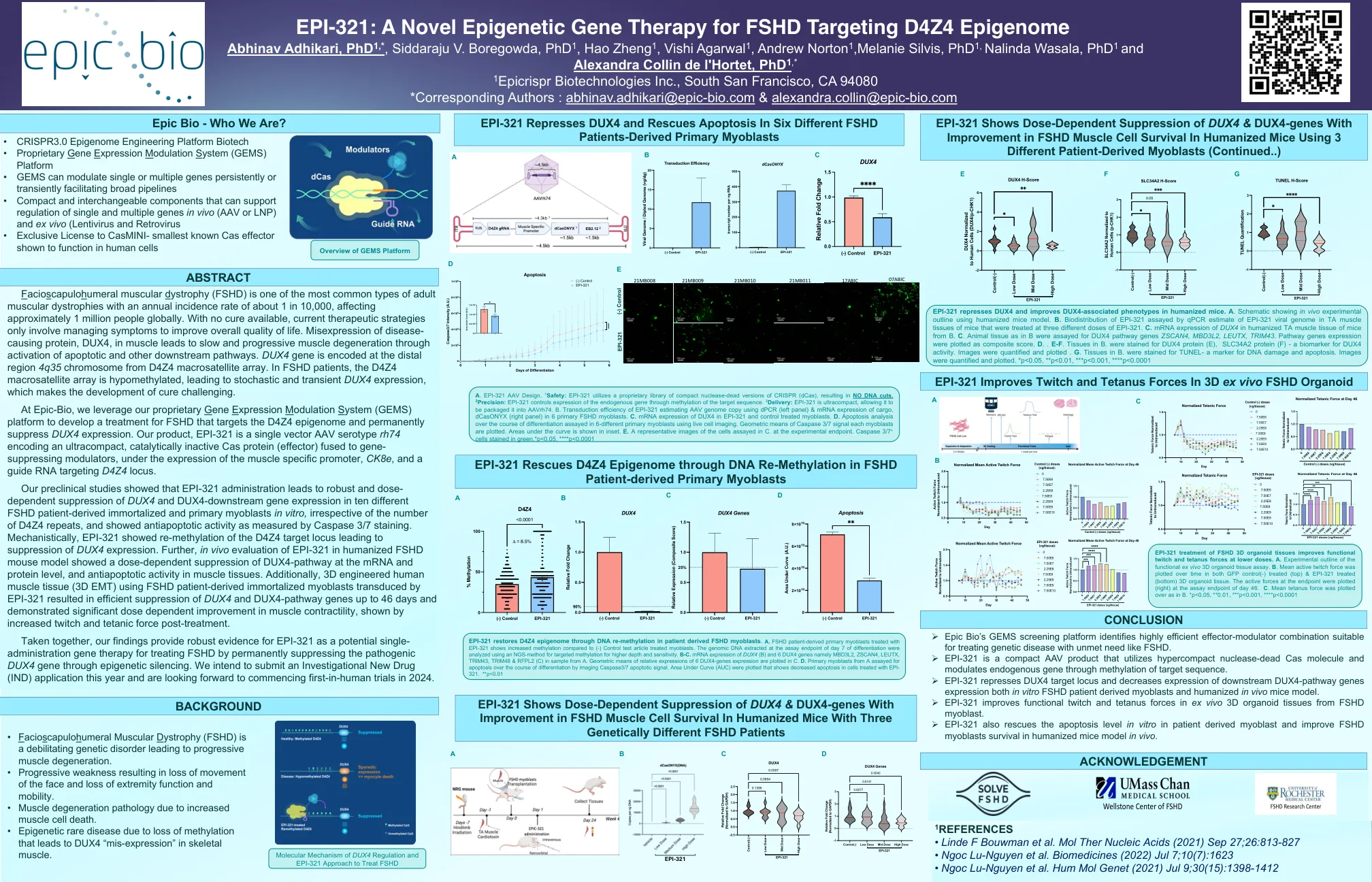
我们的临时性研究表明,Epi-321的给药可在十种不同的FSHD患者衍生的患者衍生的永生化和原发性成肌细胞中对Dux4和Dux4-Downstream基因表达的稳健和剂量抑制,无论D4Z4重复序列的数量如何,并且表现出抗iapoptication Asspase 3 Inge caspase 3 ige。从机械上讲,Epi-321显示了D4Z4靶基因座的重新甲基化,从而导致DUX4表达抑制。此外,在人源化FSHD小鼠模型中对Epi-321的体内评估显示,在mRNA和蛋白质水平上对Dux4-Pathway的剂量依赖性抑制作用,以及肌肉组织中的抗凋亡活性。此外,使用FSHD患者衍生的永生化的成肌细胞(Epi-321)进行了3D设计的人体肌肉组织(3D EMT),从而有效地抑制了DUX4和DUX4-PATHWAY基因长达46天,并显示出肌肉缩减性的剂量依赖性,表现出了肌肉缩减的显着改善,表现出受肌肉的增长和Teteratient poptertic posteatial posteat posteat teteat teteat awteat aTteat aTteat aTeat eateat aTeat酸味。

测量的总汞和甲基汞浓度
以下成分(以下称为“组织”)在每只鱼时被解剖:大脑,尾骨,背部肌肉,胆囊,g丝,性腺,心脏,心脏,肠,肝脏,肝脏和胃衬里。仅采样白色肌肉组织;将背部肌肉在背鳍插入底部的孔和通风口前的后方采样,然后将尾肌放在脂肪鳍后的后方,并在尾部的前面。在分析之前,将皮肤,骨骼和软骨从白色肌肉组织中去除。性腺被整体取样,并不区分为睾丸或卵巢,因为柳叶鱼大于100 cm是同时的雌雄同体(Bañon等人。2022)。胃被清空,用Milli-Q水冲洗以清除所有内容物。解剖后,将所有组织用Milli-Q轻轻冲洗,以避免样品之间的污染,放置在预先投资的旋风中,并在干燥之前和之后称重以测量水分含量。组织在-80°C中冷冻,然后在旋转式中进行冷冻干燥和匀浆或使用电子磨坊(IKA管磨机100控制)。铣削容器和工具在样品之间用95%的乙醇清洁。

提高基于生物混合肌肉的生物的性能......
材料的性能至关重要,如柔顺性、柔韧性以及与人机交互的整体安全性。通常,传统机器人材料的刚性和硬度限制了它们在某些医疗保健或生物医学领域的应用。[1–3] 材料科学的最新发展使得制造仿生软机器人成为可能,这种机器人能够执行一些简单类型的驱动 [4],包括爬行、[5] 抓握 [6] 或改变形状 [7],但它们仍然远远达不到生物体的复杂性和运动精细度。软机器人最受研究的应用之一是开发能够模仿哺乳动物天然肌肉组织性能的人造肌肉。肌肉组织本质上很复杂,既强壮又快速,同时通过其纤维束的有效自组织实现各种各样的运动。然而,目前的材料仍然缺乏完全复制这些特性的能力。 [8] 此外,人们强烈希望获得生物组织的其他特性,如自我修复、能源效率、功率重量比、适应性或生物传感等,但这些特性很难用人造软材料实现。[9] 生物混合机器人技术应运而生,作为一种协同策略,将生物实体和人造材料的最佳特性整合到更高效、更复杂的系统中,希望能克服当前软机器人面临的困难。已经提出了几种统一生物混合设备开发的策略

提高基于生物混合肌肉的生物的性能......
材料的性能至关重要,如柔顺性、柔韧性以及与人机交互的整体安全性。通常,传统机器人材料的刚性和硬度限制了它们在某些医疗保健或生物医学领域的应用。[1–3] 材料科学的最新发展使得制造仿生软机器人成为可能,这种机器人能够执行一些简单类型的驱动 [4],包括爬行、[5] 抓握 [6] 或改变形状 [7],但它们仍然远远达不到生物体的复杂性和运动精细度。软机器人最受研究的应用之一是开发能够模仿哺乳动物天然肌肉组织性能的人造肌肉。肌肉组织本质上很复杂,既强壮又快速,同时通过其纤维束的有效自组织实现各种各样的运动。然而,目前的材料仍然缺乏完全复制这些特性的能力。 [8] 此外,人们强烈希望获得生物组织的其他特性,如自我修复、能源效率、功率重量比、适应性或生物传感等,但这些特性很难用人造软材料实现。[9] 生物混合机器人技术应运而生,作为一种协同策略,将生物实体和人造材料的最佳特性整合到更高效、更复杂的系统中,希望能克服当前软机器人面临的困难。已经提出了几种统一生物混合设备开发的策略