XiaoMi-AI文件搜索系统
World File Search System表示

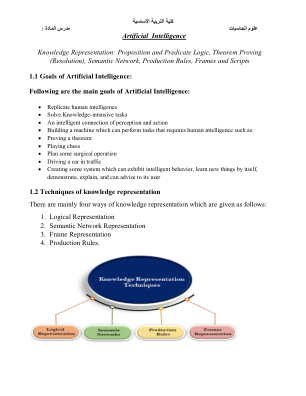
分布式与本地表示
Goldsmith, JA (1990)。自音段和韵律音系学。牛津:Blackwell。 Halle, M. (1983)。论区别性特征及其发音实现。自然语言与语言学理论 1:91-105。 Hulst, H. vd (1989)。音段结构的原子:成分、手势和依赖性。音系学 6:253-284。 Lombardi, L. (1994)。喉部特征和喉部中和。纽约:Garland。 Padgett, J. (1995)。特征几何中的限制。斯坦福:CSLI 出版物。 Sandler, W.,编辑 (1993)。音系学:手语音系学特刊。音系学 10:165-306。 Schane, SA (1984)。粒子音系学的基础。音系学年鉴 1:129–155。Walsh, DL (1997)。流音音系学。博士论文。马萨诸塞大学阿默斯特分校。Williamson, K. (1977)。辅音的多值特征。语言 53:843–871。
人工智能:表示和问题解决
• 用于 CSP 的具有最小冲突启发式的迭代改进算法 • 爬山法(贪婪局部搜索) • 随机游走 • 模拟退火 • 束搜索 • 遗传算法 • 识别局部搜索算法的完整性和最优性 • 比较不同的局部搜索算法以及与

稀疏分布式表示
SDR 由数千个位组成,其中在任何时间点,一小部分位为 1,其余为 0。SDR 中的位对应于大脑中的神经元,1 表示相对活跃的神经元,0 表示相对不活跃的神经元。SDR 最重要的特性是每个位都有意义。因此,任何特定表示中的一组活跃位都编码了所表示内容的语义属性集。这些位没有标记(也就是说,没有人为这些位赋予意义),而是学习了位的语义意义。如果两个 SDR 在相同位置有活跃位,则它们共享这些位所表示的语义属性。通过确定两个 SDR 之间的重叠(两个 SDR 中均为 1 的等效位),我们可以立即看到两个表示在语义上如何相似以及它们在语义上如何不同。由于这种语义重叠特性,基于 SDR 的系统会自动根据语义相似性进行概括。
PowerPoint的标准表示
tckgen fods/fod_wm.nii.gz -fslgrad bvecs.bvec bvals.bval -seed_image rois/plic_r.nii.gz -include rois/prectentral rois/prectentral_r_dwi.nii.nii.nii.gz -include rois/pons/pons/pons_r.nii.grude。 rois/midsagittal_to_dwi.nii.gz -mask correction_diffusion_data/b0_brain_mask.nii.gz -force corticospinal_tract/cst_r.tck

知识表示和推理
2月5日,星期三(15H45)在B4.233室 +组织(14')2月6日,星期四(15h45)动机(72')2月11日,星期二(15H45)介绍(15H45)介绍(170')2月12日,星期三(170')在2月19日(星期三)(15h45)在P3E11开会1(2月24日)开始作业1(于2月24日);开始家庭作业2(在3月3)2月20日,星期四(15H45)建模(106')2月26日,星期三(15H45)在B4.233举行的会议;讨论家庭作业1 2月27日,星期四(15H45)语言(128'),星期二,3月。4(15H45)3月,3月。5(15H45)在B4.233举行的会议;讨论家庭作业2,开始作业3(将于3月 23)3月,星期三 12(15H45)在B4.233举行的会议; 3月13日(15H45)的开始项目工作(119')5(15H45)在B4.233举行的会议;讨论家庭作业2,开始作业3(将于3月23)3月,星期三12(15H45)在B4.233举行的会议; 3月13日(15H45)的开始项目工作(119')12(15H45)在B4.233举行的会议; 3月13日(15H45)的开始项目工作(119')

视觉表示对齐
在为人提供服务时,机器人需要优化与最终用户偏好保持一致的奖励。由于机器人将依靠原始的感知输入,因此他们的奖励将不可避免地使用视觉表示。最近,使用预训练的视觉模型的表示形式引起了人们的兴趣,但是在机器人技术中使这些工作的关键是微调的,这通常是通过动力学预测或执行时间周期矛盾的代理任务来完成的。但是,所有这些代理任务绕过了人类对他们重要的事物的输入,加剧了弹性相关性,并最终导致行为与用户偏好不一致。在这项工作中,我们建议机器人应利用人类的反馈将其视觉表示与最终用户保持一致,并解散该任务的内容。我们提出了representation-基于P参考的L奖(RAPL),这是一种通过基于偏好的学习和最佳运输的镜头来解决视觉表示对准问题和视觉奖励学习问题的方法。在X魔术和机器人手术中的实验中,我们发现Rapl的奖励始终产生具有较高样品效率的首选机器人行为,并在从不同的体现中学到与机器人的实现时显示出强烈的零光概括。