XiaoMi-AI文件搜索系统
World File Search System视频
P-gp在癌症治疗中的作用 母亲糖尿病和新生儿 基于环氧链的链酸(PLA) 对视频语义标签的开放物的分析 在整个花朵季节中,定期添加葡萄糖抑制了在添加剂湖水样品中的蓝细菌丰度 通过全面的渗透测试增强移动安全 生物有效的效率是改善塞内加西尼斯和斯威尼尼尼尼氏树的生长的自然替代品之一,以及可持续性 关键趋势推动了马来西亚银行业的生成人工智能采用的采用 与BEC和顺铂的组合处理协同增强抗癌活性,并导致绝对生存 抗血管生成药物在小细胞肺癌的一线治疗中的研究进度 使用具有自我测量物理状况指标的机器学习算法的心脏病预测 风险与国立大学医院中心的糖尿病性视网膜病有关的因素Hubert Koutoukou Maga
p-糖蛋白(P-gp)是ATP结合盒(ABC)转运蛋白家族的成员,在多药耐药性(MDR)在癌症治疗中起着至关重要的作用。p-gp积极地从癌细胞中泵送化学治疗药物,降低其细胞内浓度,从而降低其疗效。本综述探讨了P-gp对MDR贡献的机制,包括内在和获得的抗性。它还讨论了抑制P-gp的各种策略,例如阻断药物结合位点,干扰ATP水解以及改变细胞膜整体性。还检查了第四代P-gp抑制剂和其他新型抑制剂的潜力,以增强癌症疗法的有效性。理解和克服P-gp介导的MDR对于改善癌症患者的治疗结果至关重要。关键字

多幕后注意的视频变压器网络,用于手势识别
摘要 - 动态手势识别是签名者手的姿势,大小和形状的变化,引起的研究领域之一。在这封信中提出了用于动态手势识别的多幕后注意视频变压器网络(MSMHA-VTN)。使用变压器多刻录头注意模型提取了multiscale特征的锥体层次结构。所提出的模型对变压器的每个头部采用不同的注意力维度,使其能够在多尺度上提供注意力。此外,除了单一模态外,还检查了使用multiple模态的识别性能。广泛的实验表明,在NVMENTURE和BRIAREO数据集上,总体精度分别为88.22%和99.10%的总体精度,表现出了卓越的性能。

从非事故交通视频
安全测试是自动驾驶系统(ADSS)开发的基本支柱。为了确保ADS的安全性,生成各种安全性的测试方案至关重要。现有广告从业人员主要集中于在模拟环境中重现现实世界中的交通事故以创建测试场景,但必须强调,由于人类驾驶和自主驾驶之间的差异,这些事故中的许多事故并未直接导致对ADS的安全违规。更重要的是,我们观察到,某些无事故现实世界的情况不仅可以导致广告中的不良行为,而且还可以在模拟测试期间利用违反广告的行为。因此,从常规交通情况(即无碰撞场景)中发现安全侵犯ADS的行为至关重要,以确保自动驾驶汽车(AVS)的安全性。我们介绍了Leade,这是一种实现上述目标的新方法。它会自动从交易视频中生成抽象和具体的方案。然后,它优化了这些场景,以在人类驾驶安全工作的语义一致方案中搜索对广告的安全侵犯。具体来说,Leade增强了大型多模型(LMM)的能力,可以通过流量视频准确构建抽象场景,并通过多模式的几种思想链(COT)生成具体场景。我们在Apollo的工业级4级广告上实施并评估Leade。基于它们,Leade评估并增加了自我车辆(即,与正在测试的ADS连接的车辆)和在语义同等场景中进行人类驾驶之间的行为差异(这里等效语义意味着测试场景中的每个参与者都具有与原始实际交通情况中相同的抽象行为)。实验结果表明,与最先进的广告场景生成方法相比,Leade可以准确地从交通视频中生成测试场景,并有效地发现了具有相同无事故交通情况语义语义的测试场景中更多类型的安全违反Apollo的行为。

transpixar:使用透明度推进文本到视频生成
文本到视频生成模型已取得了长足的进步,从而实现了娱乐,广告和教育方面的多种应用。但是,由于数据集有限和适应现有模型的困难,生成包括透明度的Alpha频道的RGBA视频仍然是一个挑战。alpha通道对于视觉效果(VFX)至关重要,允许烟雾和反射等透明元素无缝地融合到场景中。我们介绍了Transpixar,这是一种在保留原始的RGB capa-lisions的同时扩展了验证的视频模型的方法。Transpixar利用扩散变压器(DIT)结构,结合了α特异性令牌和基于Lora的微调来共同生成具有较高一致性的RGB和Alpha通道。通过优化构度,Transpixar保留了原始RGB模型的优势,并在RGB和Alpha通道之间达到了强烈的对齐,尽管培训有限

Aqua:带有视觉锚点的软件教程视频中的自动提问
但是,在某些情况下,即使在视频中跳来跳去后,用户仍然很难构成某些部分,尤其是如果视频无法解决其特定查询时。在这种情况下,他们经常在评论部分留下问题,要求对视频的特定部分进行进一步的解释[54]。虽然及时回答问题对于从教程中有效学习至关重要,但是从社区获得答案或教程作者可能需要数小时或几天。在某些情况下,问题甚至可能没有解决。解决问题的延迟会破坏学习过程,并阻止观众完全参与教程内容。为了解决这个问题,我们探索了自动回答有关教程视频问题的过程的方法。我们首先是对用户问答行为的深入分析。为了洞悉这种行为,我们从Autodesk Fusion 360的前20个最受欢迎的视频教程(3D计算机辅助设计(CAD)软件应用程序中,我们收集了所有5,944个共同的数据集。在评论中确定了663个问题后,我们进一步确定了四个主要类别问题:有关教程内容(“内容”)的问题,有关学习者的个人设置的问题或有关教程(“用户”)(“用户”)的挑战,有关视频的元信息(META)的问题,以及与内容不直接相关的问题。

引用这篇文章为:KeleşHo,Omurtag A.视频游戏体验会影响腹腔镜手术中的性能,认知负荷和大脑活动
腹腔镜手术为患者带来了可观的好处,包括小切口,快速康复,住院短暂和减轻术后疼痛。这些转化为患者的安全性提高和对医疗保健系统的重大经济利益。但是,腹腔镜手术很困难,并且对外科医生的感知和认知能力施加了更多要求。腹腔镜外科医生以间接的,狭窄的视觉访问和最小的触觉反馈来运作。这样的条件需要以不同的学习曲线和新的培训方法的新技能。对于居民来说,在具有记录的标准的安全培训环境中获得专业知识至关重要。不仅表征观察到的表现,而且表征受训者的认知努力以及生理和大脑活动概况,其最终目的是设计更好的培训和评估方法(1-3)。直接观察可能表明学员的性能足够,但它可能无法预测培训环境以外的技能或实际表现的长期保留,而表现的受训者在随后的现实世界中的表现可能会有所不同。

使用视频视觉变压器对周围车辆的巷道更改预测
摘要:预期周围车辆的车道变化对于自动驾驶汽车的安全和ffi cient运行至关重要。以前的作品采用了不包含上下文信息的物理变量的用法。最近的方法依赖于行动识别模型,例如3D CNN和RNN,从而处理了复杂的体系结构。尽管变形金刚的出现成为行动识别,但采用变压器体系结构的作品有限。自主驾驶依赖于许多外部因素,包括驾驶员行为,天气状况,意外障碍和遵守Tra FFI C规则。但是,关键组件是能够准确预测自动驾驶汽车之前的车辆是否可能改变车道的能力。这项研究通过采用视频动作预测来应对自动驾驶汽车中车道变化预测(LCP)的关键挑战,并特别着重于整合视频视觉变形金刚(Vivit)。使用摄像头输入得出的小管嵌入,此方法利用了预防数据集,该数据集提供了对车辆轨迹和关键事件的详细注释。该方法超过了先前的模型,在通过1秒地平线预测车道变化方面达到了超过85%的测试精度。比较分析重点介绍了Vivit在视频数据中捕获时空依赖性方面的优越性,同时也需要更少的参数,从而提高了计算EFFI的效率。这项研究有助于通过展示Vivit在现实世界应用中的E FFI CACY并提倡进一步探索以提高车辆安全性和E FFI效率的进一步探索,从而有助于提高自主驾驶技术。

初审2026视频彩票终端收入...
I.简介2 a。概述2 b。目的和立法背景2 c。法定要求3 d。社区规划环境3 II。FY2026最终支出计划5 a。收入估计为5 b。Parks Heights总体规划区分配5 c。 1英里半径分配9 III。Park Heights总体计划区域12 a中的项目状态更新。Park Heights主要重建区12 i。开发项目13 b。Park Heights总体规划区14 i。当前的住宅开发项目14 II。公园高地的家庭维修补助金15 iii。非住宅开发项目17 IV。未来/计划的发展机会19 IV。附录21 a。 FY26支出计划资金摘要21 b。 Pimlico局部影响有助于资格资格图23 c。当前PCDA成员24

开放世界GPS目标视频导航方法(草稿)
建筑原则。我们开发了一个模块化系统,解决了任务基础的关键挑战:(i)(ii)开放世界人类环境中使用单眼相机进行视觉导航,并具有(iii)低频,高潜伏期感应和控制。不可靠的传感器流与嘈杂的本体感受相结合,在单眼环境中具有准确的深度和比例估计,具有挑战性。要解决(i),选择了依靠语义图像提示,而不是放弃3D度量几何估计,而是专注于2D图像空间中的遍历性估计。为了概括(ii)的不同场景和外观变化,使用了大规模数据集上预测的视觉特征,并在frodobots-2k数据的精选部分上进行了微调。由于硬件限制和延迟的不可预测性,(iii)很难直接解决。该系统的重点是处理次优路径找到引起的导航故障和较差的Trajectory跟踪,这是由于通信不良引起的。这是通过使用可靠的故障检测和恢复来增加导航管道来实现的。在高水平上,系统(图1)由受到启示,控制和故障检测和恢复模块组成。感知模块估计了从RGB输入的遍历性,并且还向下一个路点发出以自我为中心的方向向量。控制模块选择与Waypoint向量对齐并生成控制命令的基因差异可行的轨迹。感知。故障检测和恢复模块是对原始RGB进行的监督监视器,并预测从感知到检测失败的遍历性,覆盖控制模块以在必要时执行启发式恢复行为。鉴于需要在开放世界的人类环境中进行操作而没有由于单眼设置而没有可靠的深度感应,因此使用了基于场景语义的视觉遍历性预测。感知模块将RGB图像作为输入,并根据输入图像输出遍历性掩码,并在[0,1]中以遍历性得分为单位。在内部,快速的遍历性估计器会产生一个初始面膜,然后通过聚类启发式方法进一步进行后处理,以识别并强烈惩罚可能的障碍。估算器使用验证的恐龙视觉特征,可以对各种环境进行强有力的概括,并允许进行样品有效的训练和填充来适应新场景。在捕获不同地形上的偏好时,要训练轮式Frodobot配置的估计器,这是一种自动从Frodobots-2K
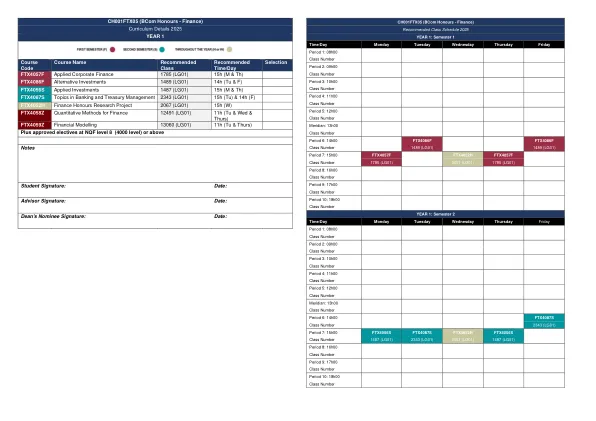
CH001FTX05(BCOM荣誉 - 财务) CB003BUS09(BBUSSC-定量融资) 视频转录:物质性 CB025BUS09(BBUSSC-定量融资) CH001BUS09(BCOM荣誉 - 定量金融)
FTX4059Z财务建模13060(LG01)11H(TU&THRES)加上NQF 8级(4000级)或更高的批准选修课