XiaoMi-AI文件搜索系统
World File Search System计划者
Chipping Campden邻里发展计划
首先是NDP是工具。它没有向计划者决定做出计划决定时能做和不能做什么。我们的NDP无权这样做。,但它构成的是有关我们城镇的信息的汇编,也表明了我们城镇中关于未来发展的意愿。因此,在其他地方的计划者可以参考NDP,以最适合我们的方式做出决定。您会看到新民主党中有大量的“技术”语言,这正是因为它已经为专家计划者准备了阅读。

IDB-A多级运动计划:光纤束配方
抽象的高维运动计划问题通常可以通过使用多级抽象来更快地解决。虽然有多种方式正式捕获多级抽象,但我们以纤维束的方式制定了它们。纤维束基本上使用本地产品空间来描述状态空间的低维投影,这使我们能够根据捆绑限制和捆绑截面来简化和得出新颖的算法。鉴于这种结构和相应的可允许约束函数,我们为高维状态空间开发了高度有效和基于最佳采样的运动计划方法。这些方法通过使用捆绑图来利用捆绑的结构。这些原语用于创建新颖的捆绑计划者,快速探索商的空间树(QRRT*)和商空间路线图计划者(QMP*)。两个计划者均显示出概率完整且几乎渐近地最佳。为了评估我们的捆绑计划者,我们将它们与四个低维情况的基准测试和基于经典的计划者进行了比较,以及八个高维场景,范围从21至100度的自由度不等,包括多个机器人和非健康的约束。我们的发现显示了多达2到6个数量级的改进,并强调了多级运动计划者的效率以及使用Fier Bundles的术语来利用多级抽象的有益。

llm个性化:通过加强管家机器人的加强自我训练将LLM计划者与人类的偏好保持一致
大型语言模型(LLMS)通过利用其语言理解和文本生成功能来显示机器人应用,尤其是任务计划的重要潜力。然而,在诸如家用机器人技术之类的应用中,这些模型的个性化仍然存在着重要的差距。例如,LLM计划可能会发现执行需要个性化的任务,例如决定基于特定的家庭喜好将杯子放在厨房中的位置。我们介绍了LLM-Persyalize,这是一个新颖的框架,旨在个性化家庭机器人的LLM计划。llm-persyalize使用llm计划在多房间,部分观察的家庭环境中执行迭代计划,并利用从本地观察结果动态构建的场景图。要将LLM计划者个性化对用户偏好,我们的优化管道整合了模仿学习和加强自我训练。我们评估了LLM-个性化家政人员,这是一个具有挑战性的现实世界3D基准,用于家庭重排,表明,成功率比现有的LLM计划者增长了30%以上,这表明与人类偏好相符。

什么是初步计划会议(PPM)?为什么重要?
初步计划会议(PPM)是正式许可程序的第一步。在提交您的正式计划和分区申请之前,将提交预定申请,并将包括与项目代表(例如赞助商,代理和建筑师)和计划中的员工代表会议。共同努力,您和指定的计划者将审查您的建议,以确保符合适用的县要求以及与开发和设计相关的标准。如有必要,计划者还将与您合作,通过建议您考虑修改或替代方案来加强建议。预定前为计划者提供了一个一对一的机会,可以概述与项目相关的特定代码要求和许可/程序。计划者还将提供并审查适当的许可申请数据包,提交清单,时间表和费用。在项目阶段早期提交的预申请可以帮助确保项目满足必要的要求并避免昂贵的延迟。期望什么

O9数字供应链ESSENTION专业认证程序Me_7O9数字供应链ESSENTION专业认证程序Me_7
•计划者和计划支持角色在ITES公司中:学习者可以从IT支持服务(ITES)公司的计划者开始,从而优化供应链流程以进行有效的运营。他们还可以提供计划支持,利用技术来进行数据分析和IT服务中的决策。•供应链管理(SCM)角色:学习者将能够在各种公司的供应链管理部门中寻求职位,在那里他们可以为综合业务计划做出贡献 - S&OP,S&OP,需求预测,总体规划,库存计划和物流。•未来的职业发展:随着学习者在职业生涯中的发展,他们可能会通过进一步的基于角色的培训成为计划者,SCM顾问或解决方案建筑师。•O9解决方案将有助于安置帮助
内部和外部 - 广告生物多样性数据工程科学家
成功的申请人将位于Ezemvelo KZN Wildlife的总部,必须能够在各个保护区设置中旅行和工作。能够构建将保护区数据库连接,整合,监督和增强整个科学服务的现有生物多样性数据库,管理和转换并将现有数据呈现为Ezemvelo KZN野生动物野生动物科学家,计划者,计划者及其科学分析的稳定,可靠且可用的格式。
A&D供应链未来的三个关键改进领域
这家领先的航空航天和国防制造商建造了需要最大协调的复杂产品。计划者的任务是建立预测,同时考虑了大量的提单,分层供应商和其他多个因素。洛克希德·马丁(Lockheed Martin)实施了Kinaxis®Maestro™平台,以连接其供应链中的点和数据,从而将团队组合在一起并提高可见度。因此,预测更加可靠,计划者触手可及的更多信息,而洛克希德·马丁(Lockheed Martin)拥有应对任何事情所需的信心。

在混乱环境中基于激光雷达的空中跟踪的分散群轨迹生成
摘要 - 具有多个无人机(UAV)的航空跟踪在各种应用中具有广泛的潜力。但是,现有的群追踪作品通常缺乏在混乱环境中保持高目标可见性的能力。为了解决这种缺陷,我们提出了一个分散的计划者,该计划者可以最大化目标可见性,同时确保无碰撞的动作进行群体跟踪。在本文中,首先通过分散的动力学搜索前端对每个无人机的跟踪性能进行了分析,该搜索为初始化安全的飞行走廊和可见扇区提供了最佳的指导路径。之后,满足走廊约束的多项式轨迹是由空间 - 周期性优化器产生的。车间碰撞和避免阻塞也被纳入优化目标。通过与其他尖端作品进行广泛的基准比较来验证我们方法的范围。与基于自主激光雷达的群体系统集成在一起,提出的计划者在现实世界中展示了其效率和鲁棒性,这些实验杂乱无章。
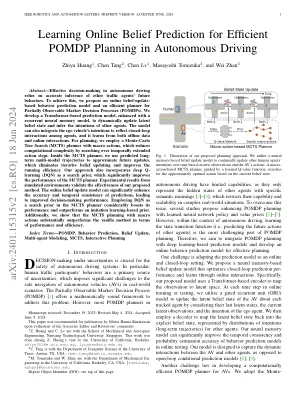
学习在线信念预测自动驾驶中有效POMDP计划
摘要 - 自主驾驶中有效的决策依赖于其他交通代理的未来行为的准确推断。为了实现这一目标,我们提出了一个基于在线信念的行为预测模型,也提出了一个有效可观察到的马尔可夫决策过程(POMDP)的有效计划者。我们开发了一个基于变压器的预测模型,通过复发性神经记忆模型增强,以动态更新潜在信念状态并推断其他代理的意图。该模型还可以整合自我车辆的意图,以反映代理之间的闭环交互,并从离线数据和在线交互中学习。为了计划,我们采用了一个具有宏观动作的蒙特卡洛树搜索(MCT)计划者,从而通过搜索时间扩展的动作步骤来降低计算复杂性。在MCTS计划者中,我们使用预测的长期多模式轨迹来近似未来的更新,从而消除了迭代信念的更新和提高跑步效率。我们的方法还将深度Q学习(DQN)作为搜索事务,从而大大提高了MCTS计划者的性能。模拟环境的实验结果验证了我们提出的方法的有效性。在线信念更新模型可以显着提高预测的准确性和时间一致性,从而改善决策绩效。在MCT计划中,采用DQN作为搜索,大大提高了其性能,并优于基于模仿学习的先验。此外,我们表明,具有宏观动作的MCT计划在性能和效率方面大大优于香草方法。