XiaoMi-AI文件搜索系统
World File Search System软材料
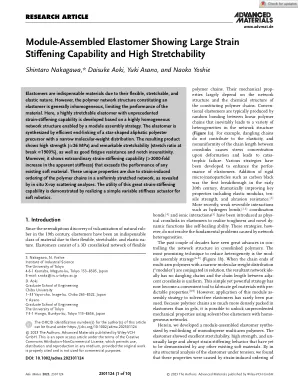
模块组装的弹性体显示大量应变僵硬的能力和高可伸缩性
弹性体是必不可少的材料,因为它们的灵活,可拉伸和弹性性质。但是,构成弹性体的聚合物网络结构通常是不均匀的,从而限制了材料的性能。在这里,具有前所未有的应变性能力的高度可拉伸的弹性体是基于模块组装策略启用的高度均匀网络结构而开发的。弹性体是通过狭窄的分子量分布的星形脂肪族聚酯前体的有效末端链接来合成的。所得的产品显示出高强度(≈26mPa)和显着的可伸缩性(伸展比在突破≈1900%),以及良好的疲劳性耐药性和缺口不敏感性。此外,它显示出超出任何现有软材料的性能的非凡应变性功能(> 2000倍的增长)。这些独特的特性是由于应变诱导的聚合物链在均匀拉伸的网络中的排序,如原位X射线散射分析所揭示的那样。通过实现一个简单的变量sti sti sti sti or sectuator,用于软机器人技术,证明了这种伟大的应变性能力的实用性。
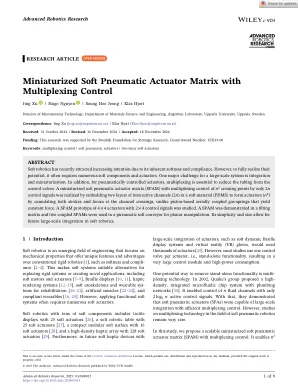
具有多路复用控制的微型软气动执行器矩阵
摘要 软机器人因其固有的柔软性和柔顺性而受到越来越多的关注。然而,要充分发挥其潜力,通常需要许多软部件和执行器。大型系统面临的一个主要挑战是集成和小型化。此外,对于气动控制的执行器,多路复用对于减少控制阀的管道至关重要。通过在软材料 (PDMS) 中嵌入两层交互式通道 (2 n ) 来形成执行器 (n 2 ),通过在通道交叉点处累积行程和力,实现了仅通过 2 n 个控制信号对 n 2 个交叉点进行多路复用控制的小型化软气动执行器矩阵 (SPAM),这与产生恒定力的基于活塞的串联耦合气弹簧不同。研究了一种具有 2×4 个控制信号的 4×4 执行器的 SPAM 原型。在倾斜矩阵中演示了 SPAM,并在气动软传送带中使用两个耦合的 SPAM 进行平面操作。它的简单性和尺寸使其未来能够大规模集成到软机器人中。

用于小型软机器人的磁响应聚合物的双材料气溶胶喷射打印
在许多技术和生物医学应用中,都非常希望能够创建具有在线可定制和局部可控磁性能的磁响应软材料 (MSM)。本文首次使用计算机控制的双材料气溶胶喷射打印 (DMAJP) 技术展示了这一能力。这种方法可以在打印过程中控制磁性纳米粒子 (MNPs) 墨水和光固化聚合物气溶胶之间的成分变化。两种气溶胶的混合比决定了纳米复合材料中的 MNPs 负载,可用于局部控制打印结构的磁性。打印过程采用逐层结构化,结合牺牲层方法,用于构建完全独立的 MSM 结构,该结构将磁活性和非磁活性元素结合在单一工艺多材料打印方法中,无需进一步组装要求。利用该方法,可以直接制造具有复杂形状和可编程功能的小规模多材料软物体,其运动可以通过施加外部磁场来控制。

有机神经形态设备:过去,现在和未来...
神经形态计算领域的主要目标是构建机器,以并行且能量效率良好地执行复杂的任务,从而模仿大脑的各个方面。多亏了新的计算体系结构,这些机器可以彻底改变高性能计算,并找到对传感器和机器人进行本地低能计算的应用程序。在神经形态计算中使用有机和软材料在许多方面都具有吸引力,因为它允许更好地与生活物质整合到信号处理中无缝融合感应,并最终在封闭反馈回路中刺激。的确,有机材料的机械性能不仅可以与组织的机械性能相匹配,而且这些涉及离子的设备的工作机制(除电子外)与人类生理兼容。有机材料的另一个优点是潜在的潜力,可以引入依靠可与独一无二的形式相关的增材制造的新型制造技术。这个领域仍然很新生,因此,仍然提出了许多概念,而没有明显的赢家。此外,有机神经形态的应用领域(生物学和生物整合都非常吸引人)要求从材料到系统的共同设计方法。
设计材料制造以实现从实验室到工厂的转化......
设计材料制造以实现柔性电子产品从实验室到工厂的转化 Yifei Luo、Ming Wang、Changjin Wan、Pingqiang Cai、Xian Jun Loh*、Xiaodong Chen* Y. Luo、M. Wang 博士、C. Wan 博士、P. Cai 博士、X. Chen 教授 柔性设备创新中心 (iFLEX)、Max Planck - NTU 人工感官联合实验室、南洋理工大学材料科学与工程学院,50 Nanyang Avenue, 639798 新加坡 电子邮件:chenxd@ntu.edu.sg Y. Luo、XJ Loh 教授 新加坡科技研究局 (A*STAR) 材料研究与工程研究所,2 Fusionopolis Way, Innovis, #08-03, 138634 新加坡 电子邮件:lohxj@imre.a-star.edu.sg XJ Loh 教授 泉州师范大学化学工程与材料科学学院,福建省泉州362000 中国 关键词:柔性电子、半导体制造、软材料、先进制造、转化研究 柔性电子在过去十年中取得了令人兴奋的学术进展,但
首尔市立大学产学合作团宣传册
• Small, “基于透明离子水凝胶电极和量子点颜色转换的高变形电致发光装置实现明亮的双面白光照明“(2024) • Advanced Science, “导电水凝胶在日常生活中的无缝集成:从准备到可穿戴应用”(2024) • Advanced Functional Materials, “用于明亮电致发光装置的光学透明和机械坚固的离子水凝胶电极,实现超过 1400% 的高拉伸性”(2023) • Advanced Functional Materials, “智能皮肤粘合贴片:从设计到生物医学应用“(2023) • Chemical Engineering Journal, “用于在不同气候条件下自适应太阳能控制的自粘热致智能薄膜“(2022) • 科学和信息通信技术部, “通过控制分子间相互作用具有可变机械性能的软材料“(~2026) •科学和信息通信技术部,“可持续太阳能利用研究中心”(~2025 年) • 三星电子,“利用分子开关定时器开发超高线性动态范围图像传感器”(~2023 年)

受自然启发的基于挤压的微流体方法......
软材料通过紧密模仿生物体的复杂运动和变形行为,在小型机器人应用中发挥着至关重要的作用。然而,传统的制造方法在制造高度集成的小型软设备方面面临挑战。在这项研究中,利用微流体技术精确控制反应扩散 (RD) 过程,以生成多功能和区室化的钙交联海藻酸盐微纤维。在 RD 条件下,生产出复杂的海藻酸盐纤维,用于磁性软连续机器人应用,具有可定制的功能,例如几何形状(紧凑或中空)、交联程度和磁性纳米粒子的精确定位(在核心内部、围绕纤维或一侧)。这种精细控制允许调整微纤维的刚度和磁响应性。此外,纤维内可化学裂解的区域能够在旋转磁场下分解成更小的机器人单元或卷起结构。这些发现证明了微流体在处理高度集成的小型设备方面的多功能性。

机械工程系研究...
• 湍流和大数据 (TURB) 实验室 • 航空湍流实验室 • 航空电子集成车辆和仪器实验室 (VILAI) • 仿生纳米技术改善医疗保健 • 心血管生物力学实验室 (CBL) • 计算机器人和机电一体化 (CRM) 实验室 • 艾哈迈德材料与能源研究组 (AMERG) • 智能以人为本的自动化弹性实验室 • 设计优化与控制实验室 • 生物医学声学研究 (BMAR) 实验室 • 分布式参数系统与控制实验室 • 医学力学与制造设计 (M3D) 实验室 • 生物力学、机械生物学和生物材料实验室 • 流动控制和空气动力学实验室 • 含能材料燃烧研究实验室 • 矿物表面过程建模实验室 • 推进和反应流研究实验室 • 动态智能系统、控制和优化 (DISCO) 组 • 微流体、流变学和软物质 • 材料和界面力学实验室 • 以人为本的设计研究 (HCDR) 实验室 • 复杂流体和软材料实验室 • 计算力学实验室 • 产品设计与开发实验室 • Fazle Hussain 的研究实验室

为极端环境建造的软机器人
抽象软材料机器人独特地适合于以传统的刚性机器人实施例不能以新的方式解决极端环境中的工程挑战。软机器人材料的柔韧性,对脆性断裂的抗性,低导热性,生物稳定性和自我修复功能提出了对特定环境条件有利的新解决方案。在本综述中,我们研究了在各种极端环境中建造和操作软机器人的要求,包括在人体,水下,外太空,搜索和救援地点以及狭窄的空间。我们分析了满足这些要求的软机器人设备的实现,包括执行器和传感器。除了这些设备的结构外,我们还探索了通过设计优化,控制系统及其在教育和商业产品中的未来应用中扩展软机器人使用软机器人的方法。我们进一步讨论了软机器人的当前局限性,以认识到符合性,力量和控制的挑战。考虑到这一点,我们为机器人技术的未来提出了争论,其中混合(刚性和软)结构满足了复杂的环境需求。
欢迎来到材料科学与工程!
技术选修课 - 任何 2000 或更高的数学、科学或工程课程,除非是非科学专业的课程、重复的必修 MSE 课程或重复另一门先前修过的课程。最多只允许 2 门研究学分课程 - 如果其中一门已被用作 MSE 选修课,那么只有一门研究学分课程可以算作技术选修课。建议对 EMOPS 感兴趣的学生选择 ECE 3103 固态设备(注意先修 ECE 2630); CHEM 2410 Orgo 1 加 2311 1cr 实验室、CHEM 2420 Orgo 2 加 2321 1cr 实验室、ChE Polymers 4449(注意先修课程 CHE 3321 Transport,该课程也有先修课程)和 BME 4414 Intro to Biomaterials(注意先修课程:BME 2014 Cell/Molecular Bio 和 BME 2220 Biomechanics)建议对软材料感兴趣的学生选修;MAE/CE 2310 Statics 和 MAE/CE 2320 Strength of Materials 建议对结构材料感兴趣的学生选修。STS 或 ENGR 课程不得算作技术选修课。