机构名称:
¥ 1.0
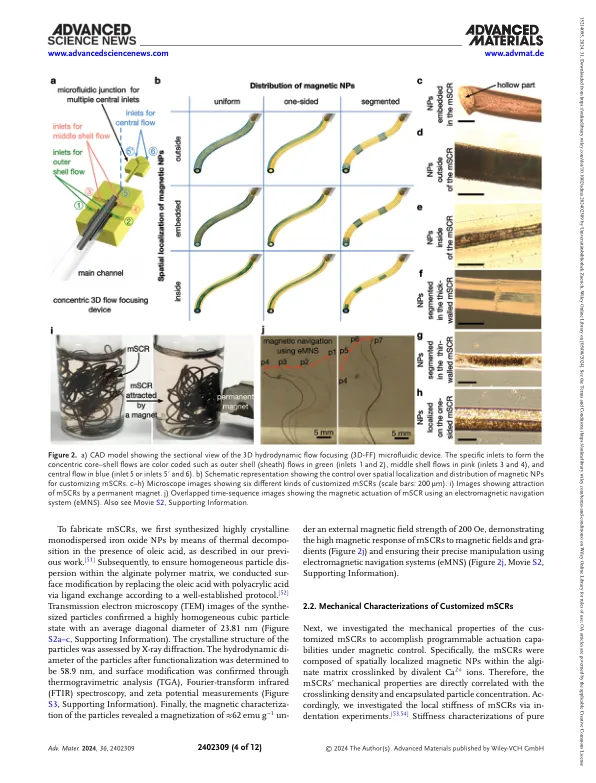
软材料通过紧密模仿生物体的复杂运动和变形行为,在小型机器人应用中发挥着至关重要的作用。然而,传统的制造方法在制造高度集成的小型软设备方面面临挑战。在这项研究中,利用微流体技术精确控制反应扩散 (RD) 过程,以生成多功能和区室化的钙交联海藻酸盐微纤维。在 RD 条件下,生产出复杂的海藻酸盐纤维,用于磁性软连续机器人应用,具有可定制的功能,例如几何形状(紧凑或中空)、交联程度和磁性纳米粒子的精确定位(在核心内部、围绕纤维或一侧)。这种精细控制允许调整微纤维的刚度和磁响应性。此外,纤维内可化学裂解的区域能够在旋转磁场下分解成更小的机器人单元或卷起结构。这些发现证明了微流体在处理高度集成的小型设备方面的多功能性。
受自然启发的基于挤压的微流体方法......
主要关键词




相关文件推荐