XiaoMi-AI文件搜索系统
World File Search System运动轨迹
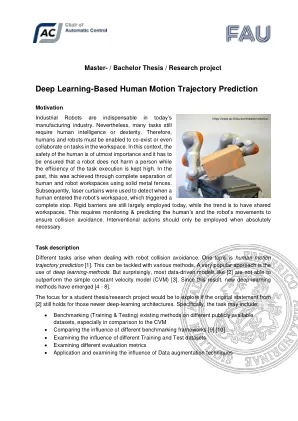
深度学习的人类运动轨迹预测
工业机器人在当今的制造业中是必不可少的。尽管如此,许多任务仍然需要人类的智力或灵巧性。因此,必须启用人和机器人在工作区中的任务共存甚至协作。在这种情况下,人类的安全至关重要,必须确保在任务执行效率较高的同时,机器人不会伤害人。过去,这是通过使用固体金属围栏完全分离人和机器人工作区来实现的。随后,使用激光窗帘来检测人类何时进入机器人的工作区,这触发了一个完整的停止。僵化的壁垒今天仍然在很大程度上被使用,而趋势是共享工作区。这需要监视和预测人类和机器人的运动,以确保避免碰撞。绝对必要时才应采取干预行动。

基于脑电图的脑机接口运动轨迹重建综合综述
近几十年来,神经科学和计算机技术的进步使得脑机接口 (BCI) 成为神经康复和神经生理学研究中最有前景的领域。肢体运动解码逐渐成为 BCI 领域的热门话题。解码与肢体运动轨迹相关的神经活动被认为对制定针对运动障碍用户的辅助康复策略有很大帮助。尽管已经提出了多种用于肢体轨迹重建的解码方法,但目前尚无一篇涵盖这些解码方法性能评估的综述。为了填补这一空白,本文从多个角度评估了基于脑电信号的肢体轨迹解码方法的优缺点。具体而言,我们首先介绍不同空间(2D 和 3D)肢体轨迹重建中运动执行和运动想象的差异。然后,我们讨论了肢体运动轨迹重建方法,包括实验范式、脑电预处理、特征提取和选择、解码方法和结果评估。最后,我们阐述了尚待解决的问题和未来的展望。

2023 年 CHI 计算机系统人为因素会议扩展摘要:追随大师之手:捕捉钢琴演奏,用于混合现实钢琴学习应用
直觉。我们引入了端到端工作流程,以准确捕捉钢琴家的技术手势并使其与乐谱保持一致。我们记录了钢琴家弹奏的技术练习和乐曲。我们开发了一个多模态性能数据集 (MPD),其中包括虚拟手模型、键盘 (MIDI) 录音和相应的乐谱,以及捕捉运动的手部轨迹的不同可视化。最后,我们开发了 Pianoverse,一款辅助钢琴学习的 MR 应用程序,并对新手钢琴演奏者进行了探索性用户测试,以了解运动的多模态表示对技能学习的影响。我们的初步观察表明,通过物理键盘理解录制表演的运动轨迹可以提高学习者正确定位身体和手的能力,并在弹奏乐谱时复制手势。进一步的研究将集中于自动化性能数据收集和对主要运动轨迹在钢琴学习中的使用的全面评估。

节能惯性驱动器,用于振动机的双频激发
摘要:大规模振动机的电动机的低效率和过多的电动机用于处理散装材料,这激发了惯性驱动器的新设计。此驱动器由一个电动机和两个同轴不平衡的质量组成,其旋转频率与比率2:1相关。这种方法允许产生具有可变振幅和频率的激发力,这取决于惯性特征和轴旋转频率,并且与不平衡质量的相位差无关。因此,可以更改所得矢量hodograph的对称轴。刺激力的光谱成分高达200 Hz含有较高的谐波,其能量份额比第二谐波含量为25.4%,比第三和更高的谐波相比改善了与单频率振动器相比改善散装物质处理的14.1%。有限元模型用于检查双频驱动器最负载单元的强度容量。它的使用允许实现复杂的运动轨迹,这些运动轨迹在技术上更有效地用于处理媒体的可变参数和筛分屏幕和其他振动机中的能源节省。

提高模拟脑机接口性能的人工智能
摘要 目的。脑机接口 (BCI) 将神经活动转化为辅助设备的控制信号,以帮助运动障碍人士有效沟通。在这项工作中,我们引入了一种新的 BCI 架构,可以改善对 BCI 计算机光标的控制,以便在虚拟键盘上打字。方法。我们的 BCI 架构结合了外部人工智能 (AI),可以有益地增强 BCI 的运动轨迹。此 AI-BCI 利用过去用户的操作(长时间(100 秒前)和短时间(100 毫秒前))来修改 BCI 的轨迹。主要结果。我们在闭环 BCI 模拟器中测试了我们的 AI-BCI,其中 9 名人类受试者执行打字任务。我们证明我们的 AI-BCI 实现了:(1) 更高的信息通信速率,(2) 目标之间的弹道运动更快,(3) 改进的精确控制以“拨入”目标,以及 (4) 更高效的运动轨迹。我们进一步表明,我们的 AI-BCI 可提高从差到精通控制的广泛控制质量范围内的性能。意义。这种 AI-BCI 架构通过提高所有评估的关键指标的 BCI 性能,可能会提高 BCI 系统的临床可行性。

机器人技术和自主系统
我们探索了对重型汽车的深钢筋学习控制器的模拟传输,该重型车辆具有主动刺激,设计用于穿越粗糙的地形。相关研究主要集中于带有电动机的轻质机器人和快速致动,但本研究使用了具有复杂液压传动系统和缓慢致动的林业车辆。我们使用多体动力学模拟车辆并应用系统标识以找到适当的仿真参数。然后,我们使用各种技术来训练模拟中的策略,以减轻SIM卡之间的空白,包括域随机化,动作延迟和奖励惩罚,以鼓励平稳控制。实际上,经过行动延迟训练的政策和对不稳定行动的惩罚几乎在与模拟中相同的水平。在水平地面实验中,运动轨迹转向两侧以及路线跟踪方案时,运动轨迹紧密重叠。面对需要积极使用悬浮液的坡道时,模拟和真实动作处于密切的对齐状态。这表明执行器模型与系统识别产生了一个足够准确的执行器模型。我们观察到,未经其他行动罚款训练的政策表现出快速切换或BANG -BANG控制。这些当前的平稳运动和模拟中的高性能,但转移到现实的很差。我们发现政策使局部高度图的边缘使用以进行感知,没有显示预测计划的迹象。然而,强大的转移能力需要在很大程度上仅限于模拟。

在不确定性下进行机器人顺序决策的学习和推理
机器人经常面临需要多个动作的复杂任务,而顺序决策(SDM)的能力是必要的。这项工作的关键贡献是一个机器人SDM框架,称为LCORPP,它支持同时进行监督学习的能力,以实现Passive国家估计,自动推理具有声明性的人类知识,并在不确定性下计划实现长期目标。尤其是我们使用混合范式来重新确定国家估计量,并为概率计划者提供信息的先验。在经验中,移动机器人的任务是使用其运动轨迹,声明性的续文知识和人类机器人互动(基于对话和基于运动)来估算人类的影响。的结果表明,在效率和敏捷性中,我们的框架的表现要比其在办公室环境中的无学习和不合理的框架要好。

通过下文模仿学习通过下一步的预测-ICRT
摘要 - 我们探讨了如何启用机器人技术下文预测模型的文化学习能力,从而使模型可以通过使用人类的Teleop演示示例提示无需微调来执行新任务。我们提出了一种因果变压器(ICRT),该因果变压器对感觉运动轨迹进行自回旋预测,其中包括图像,本体感受态和动作。这种方法允许在测试时间灵活且无训练的新任务执行,这是通过提示模型的新任务轨迹来实现的。使用Franka Emika机器人进行的实验表明,即使在与提示和培训数据不同的环境配置中,ICRT也可以适应提示指定的新任务。在多任务环境设置中,ICRT在概括方面明显胜过当前最新的机器人基础模型,以看不见任务。代码,检查点和数据可在https://icrt.dev上找到。