机构名称:
¥ 1.0
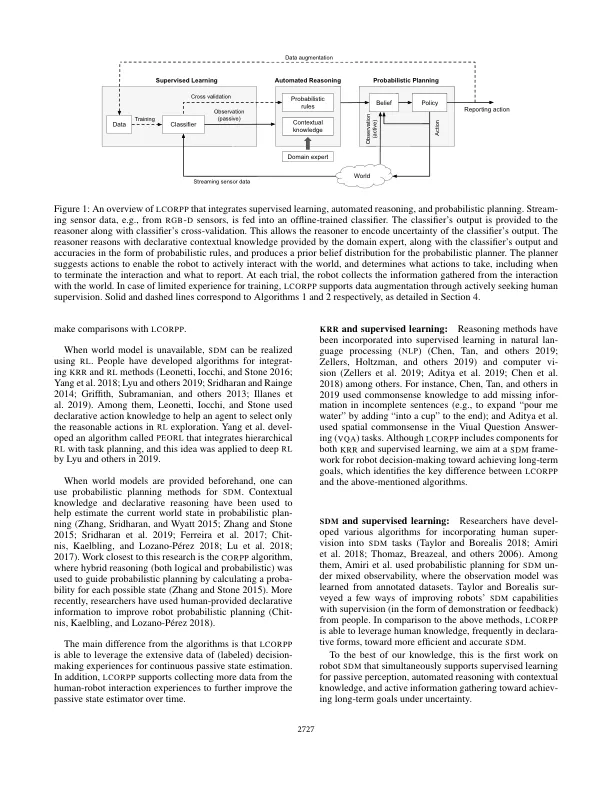
机器人经常面临需要多个动作的复杂任务,而顺序决策(SDM)的能力是必要的。这项工作的关键贡献是一个机器人SDM框架,称为LCORPP,它支持同时进行监督学习的能力,以实现Passive国家估计,自动推理具有声明性的人类知识,并在不确定性下计划实现长期目标。尤其是我们使用混合范式来重新确定国家估计量,并为概率计划者提供信息的先验。在经验中,移动机器人的任务是使用其运动轨迹,声明性的续文知识和人类机器人互动(基于对话和基于运动)来估算人类的影响。的结果表明,在效率和敏捷性中,我们的框架的表现要比其在办公室环境中的无学习和不合理的框架要好。
在不确定性下进行机器人顺序决策的学习和推理
主要关键词


相关文件推荐