XiaoMi-AI文件搜索系统
World File Search System遍历性

外星技术、结合性和遍历性
我们如何概念化先进外星文明的人工制品?在最近一项发人深省的研究中,考伊(Cowie,2022 年)从哲学的角度考虑了星际小行星状物体 1I/2017 U1 ' Oumuamua 奇异特性的人工制品解释。他考虑了著名天体物理学家亚伯拉罕·勒布(Abraham Loeb)提出的假设,即这个小物体实际上是先进外星文明的人工制品,其异常特性最好解释为它是太阳帆(Bialy 和 Loeb,2018 年;Loeb,2021 年)。考伊以精湛的方式分析了各种隐藏的假设和论证陷阱。这样的研究非常重要,而且随着我们在天体生物学方面的观察知识和理论成熟度的提高,其重要性可能会增加(另见 Cowie,2021 年)。在人们对搜寻地外文明 (SETI) 研究兴趣重新燃起的时代(现在的新名称是“寻找技术特征”;Wright

开放世界GPS目标视频导航方法(草稿)
建筑原则。我们开发了一个模块化系统,解决了任务基础的关键挑战:(i)(ii)开放世界人类环境中使用单眼相机进行视觉导航,并具有(iii)低频,高潜伏期感应和控制。不可靠的传感器流与嘈杂的本体感受相结合,在单眼环境中具有准确的深度和比例估计,具有挑战性。要解决(i),选择了依靠语义图像提示,而不是放弃3D度量几何估计,而是专注于2D图像空间中的遍历性估计。为了概括(ii)的不同场景和外观变化,使用了大规模数据集上预测的视觉特征,并在frodobots-2k数据的精选部分上进行了微调。由于硬件限制和延迟的不可预测性,(iii)很难直接解决。该系统的重点是处理次优路径找到引起的导航故障和较差的Trajectory跟踪,这是由于通信不良引起的。这是通过使用可靠的故障检测和恢复来增加导航管道来实现的。在高水平上,系统(图1)由受到启示,控制和故障检测和恢复模块组成。感知模块估计了从RGB输入的遍历性,并且还向下一个路点发出以自我为中心的方向向量。控制模块选择与Waypoint向量对齐并生成控制命令的基因差异可行的轨迹。感知。故障检测和恢复模块是对原始RGB进行的监督监视器,并预测从感知到检测失败的遍历性,覆盖控制模块以在必要时执行启发式恢复行为。鉴于需要在开放世界的人类环境中进行操作而没有由于单眼设置而没有可靠的深度感应,因此使用了基于场景语义的视觉遍历性预测。感知模块将RGB图像作为输入,并根据输入图像输出遍历性掩码,并在[0,1]中以遍历性得分为单位。在内部,快速的遍历性估计器会产生一个初始面膜,然后通过聚类启发式方法进一步进行后处理,以识别并强烈惩罚可能的障碍。估算器使用验证的恐龙视觉特征,可以对各种环境进行强有力的概括,并允许进行样品有效的训练和填充来适应新场景。在捕获不同地形上的偏好时,要训练轮式Frodobot配置的估计器,这是一种自动从Frodobots-2K

从越野设置中的长波高光谱图像
近年来,自主导航变得越来越流行。但是,大多数现有的方法在公路导航方面有效,并利用了主动传感器(例如LIDAR)。本文使用Passive传感器,特别是长波(LW)高光谱(HSI)的遍历性估计,重点介绍了自主越野导航。我们提出了一种方法,用于选择一部分高光谱带,该方法通过设计一个最小的传感器设计带选择模块,该模块设计一个最小的传感器,该模块设计了一个最小的传感器,该模块可以测量稀疏采样的光谱带,同时共同训练语义段网络网络,以进行遍历性估计。使用我们的LW HSI数据集在包括森林,沙漠,雪,池塘和开放式田野的各种越野场景中证明了我们方法的有效性。我们的数据集包括在各种天气条件下白天和夜间收集的图像,包括具有广泛障碍的具有挑战性的场景。使用我们的方法,我们学习了所有HSI频段中的一个小子集(2%),这些子频段可以在利用所有高光谱带时获得竞争性或更好的遍历性估计精度。仅使用5个频段,我们的方法能够实现平均类别的效果,该级别仅比使用完整的256波段HSI低1.3%,而仅比使用250频段HSI实现的效果仅比使用了0.1%,这证明了我们方法的成功。

dtg:基于扩散的轨迹生成,用于无MAP的全局导航
摘要 - 我们提出了一种新颖的基于端到端扩散的轨迹生成方法DTG,用于无地图的全球导航,以挑战户外场景,并具有遮挡和非结构化的越野特征,例如草,建筑物,灌木丛等。给定一个遥远的目标,我们的方法计算出满足以下目标的轨迹:(1)最大程度地降低目标的旅行距离; (2)通过选择不位于不良区域的路径来最大化遍历性。具体来说,我们为扩散模型提供了一种新颖的条件RNN(CRNN),以有效地产生轨迹。此外,我们提出了一种自适应训练方法,以确保扩散模型产生更多可遍历的轨迹。我们在各种室外场景中评估了我们的方法,并将性能与赫斯基机器人的其他全球导航算法进行比较。实际上,我们观察到的行进距离至少提高了15%,遍历性提高了7%。视频和代码:https://github.com/jinggm/dtg.git。

Marlin Polo Strub,PhD
M. Paton,M。P. Strub M. P. Strub,T。Brown,R。J. Greene,J。Lizewski,V。Patel,J。D. Gammell,I。A. D. Nesnas,《线路导航:极端地形速效流浪者的遍历性分析和路径计划》,在IEEE/RSJ国际智能机器人和系统国际会议论文集(IROS)。第7034–7041页。(doi,开放访问)

通过非原始系统实现的协变遍历量子马尔可夫半群
摘要。我们从协变完全正映射构造相对论量子马尔可夫半群。我们首先将 Stinespring 膨胀中的一个步骤推广到一般的不完全性系统,并将其基于庞加莱群。所得噪声通道具有相对论一致性,并且该方法适用于任何基本粒子,尽管我们针对类光粒子的情况进行了演示。相对论一致性完全正身份保持映射的克劳斯分解(我们的设置在海森堡图中)使我们能够构造一致连续的协变量子马尔可夫半群。我们从小群中诱导表示,以确保由于传递系统不完全性而具有遍历性的量子马尔可夫半群。

diter ++:多户户外环境中多机射击导航的各种地形和多模式数据集
摘要 - 多个现场机器人的协作对于大规模环境的导航和映射是必需的。在穿越时,考虑到每个机器人性质的遍历性估算对于确保机器人的安全并确保其性能至关重要。即使在结构化的环境中,不考虑地形信息的行驶也可能导致平台严重损坏,例如由于陡峭的斜坡或由于突然的高度变化而导致的下降。为了应对这一挑战,我们提出了Diter ++,多机器人,多主题和多模式数据集,包括地面信息。使用向前的RGB摄像头和面向接地的RGB-D相机,热相机,两种类型的激光镜头,IMU,GPS和机器人运动传感器获得数据集。数据集和补充材料可在https://sites.google.com/view/diter-plusplus/上找到。

硕士论文 - 创建任意经典基本细胞自动机的量子类似物
2 链由局部哈密顿量的总和控制。非可逆经典 CA 的量子类似物被表示为由非厄米哈密顿量控制的非幺正量子系统。介绍并分析了用于控制此类演化的两组可能的非厄米算子。分析所得的量子系统,并将其与选定规则的经典系统进行比较。相似之处包括收敛到相似状态,并在静态和周期性情况下表现出相同的行为。针对选定系统确定并解释了已知的量子现象,如遍历性及其由于希尔伯特空间碎片而导致的破坏,其中与 PXP 模型等经过充分研究的系统进行了比较。
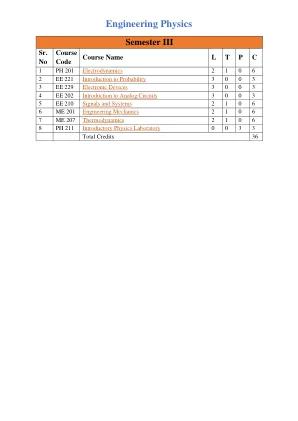
工程物理学
简介:学习本课程的动机、必修基础数学复习、实线子集上概率与长度的关系、概率形式定义、事件与$\sigma$代数、事件独立性与条件概率、事件序列与Borel-Cantell引理。随机变量:随机变量的定义、随机变量的类型、CDF、PDF及其性质、随机向量与独立性、随机变量变换简介、高斯随机向量简介。数学期望:通过例子了解平均值的重要性、期望的定义、矩与条件期望、MGF、PGF与特征函数的使用、方差与k阶矩、MMSE估计。不等式与收敛概念:马尔可夫、切比雪夫、切尔诺夫与Mcdiarmid不等式、概率收敛、均值与几乎必然、大数定律与中心极限定理。随机过程的简要介绍:示例和正式定义、平稳性、自相关和互相关函数、遍历性的定义。

倾斜费米中的 Floquet 量子多体伤痕......
一维倾斜、周期性驱动的费米-哈伯德链是量子多体物理研究的典范,特别是对于固态系统。我们报告了弗洛凯疤痕态的出现,这是一类无法进行随机热化的量子多体疤痕 (QMBS) 态。其潜在物理机制被确定为这些简并 Fock 基之间的弗洛凯共振,它们可以通过一阶跳跃扰动连接起来。借助简并弗洛凯微扰理论,我们推导出奇异 QMBS 态出现的确切条件。我们还研究了量子复兴和亚谐波响应等现象。这些结果为调节和设计固态量子多体系统以实现非遍历性提供了可能性。