机构名称:
¥ 1.0
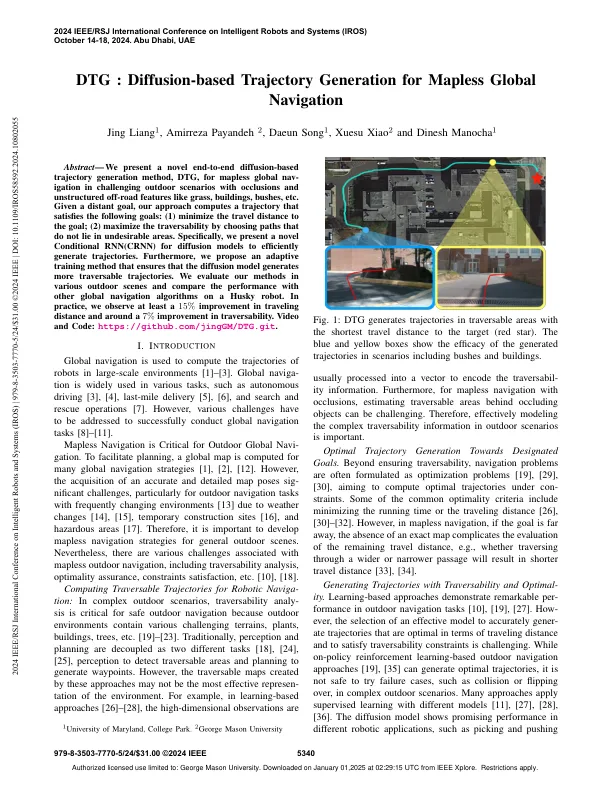
摘要 - 我们提出了一种新颖的基于端到端扩散的轨迹生成方法DTG,用于无地图的全球导航,以挑战户外场景,并具有遮挡和非结构化的越野特征,例如草,建筑物,灌木丛等。给定一个遥远的目标,我们的方法计算出满足以下目标的轨迹:(1)最大程度地降低目标的旅行距离; (2)通过选择不位于不良区域的路径来最大化遍历性。具体来说,我们为扩散模型提供了一种新颖的条件RNN(CRNN),以有效地产生轨迹。此外,我们提出了一种自适应训练方法,以确保扩散模型产生更多可遍历的轨迹。我们在各种室外场景中评估了我们的方法,并将性能与赫斯基机器人的其他全球导航算法进行比较。实际上,我们观察到的行进距离至少提高了15%,遍历性提高了7%。视频和代码:https://github.com/jinggm/dtg.git。
dtg:基于扩散的轨迹生成,用于无MAP的全局导航
主要关键词


相关文件推荐