XiaoMi-AI文件搜索系统
World File Search System避让

UAS 感知和避免所需的最小感知范围...
开发有效的感知和避让系统是无人机系统 (UAS) 在国家空域运行的关键挑战。一个关键问题是利用适用于 UAS 的轻型、低成本传感器,在足够的范围内探测潜在目标,以降低碰撞概率。我们提出了一种基于最坏情况碰撞遭遇几何形状设计最小所需感知范围的闭式分析方法。使用 500 英尺的最小安全距离和几种不同飞机的已知速度,使用松弛参数 δ r = 0 . 0354 ,发现这个最小所需感知范围约为 1.861 公里。我们通过描述实现所需最小感知范围的雷达传感器原型来证明这是一个可行的结果。

美国空中交通管制系统与影响力作斗争……
共计包括 99 份来自管制员的 TCAS II 事件报告。这是自 1981 年 8 月空中交通管制员罢工以来,管制员就单一主题向 ASRS 提交的最大数量报告。管制员报告的 TCAS II 事件总数包括 37 份航路管制员报告、58 份终端雷达管制员报告和 4 份塔台管制员报告。TCAS II 事件报告的总体增加也可归因于根据美国联邦航空条例 (FAR) 121.356 以及未来的 FAR 91.221 和 135.180 的要求安装 TCAS II 设备的航空公司和商务飞机的数量。随着机组人员和管制员遇到各种 TCAS II 避让咨询情况,报告趋势持续上升。

EFI-890R 高级飞行显示器 | DRABPOL
• 模拟和数字航向源 • 移动地图叠加 • 来自 FMS/GPS 系统的飞行计划数据(包括圆锥曲线(如果提供)) • VOR/DME 和 VOR/TAC 站位置(传感器提供的标识符) • VOR、FMS/GPS、TACAN 和 NDB 的方位和距离数据(支持模拟和数字源) • 地形感知和警告系统 (TAWS) 图形 • Vision-1 合成视觉系统 (SVS) 图形 • 增强型近地警告系统 (EGPWS) 图形 • 交通防撞和避让系统 (TCAS1、TCAS2 或 T2CAS™) 叠加 • 气象雷达显示(支持多个雷达系统 - VP 显示(如果提供)) • 电子海图、广播天气和来自多个系统的其他图形图像 • 来自兼容系统(包括 EuroNav)的任务视频 • 模拟视频,包括摄像头、增强型视觉系统 (EVS)、NTSC 复合视频和电光传感器

基于同步定位和地图绘制的自主导航系统
摘要 —本文介绍了基于同步定位和地图构建 (SLAM) 的自主导航系统的开发。本研究的动机是找到一种自主导航室内空间的解决方案。室内导航具有挑战性,因为它可以永远发展。解决这个问题对于许多服务来说都是必要的,例如清洁、医疗行业和制造业。本文的重点是描述为这个提议的自主系统开发的基于 SLAM 的软件架构。评估了该系统面向智能轮椅的潜在应用。当前的室内导航解决方案需要某种引导线,例如地板上的黑线。有了这个提议的解决方案,室内不需要翻新来适应这个解决方案。此应用程序的源代码已开源,因此可以重新用于类似的应用程序。此外,预计这个开源项目将由广泛的开源社区在其当前状态的基础上得到改进。索引术语 —深度学习、导航、物体避让、SLAM
1. 关于 Wattle Creek Energy Hub 电池能源项目...
项目区域边界(此处称为转介区域)是与 Wattle Creek 能源中心(约 6,300 公顷)相关的最大空间范围,由 Spark 目前可用的所有土地通道定义。它包括整个 Arthursleigh 地产,并涵盖拟议行动的所有方面,但场外运输路线除外。“调查区域”用于描述详细生物多样性调查中包含的区域,包括干扰区域边界先前迭代中的避让区域。调查区域是根据与 Wattle Creek 能源中心(包括风能组件)相关的原始调查区域建立的。风能组件不再是拟议的,但从这些区域收集的数据将用于评估。自从移除风能组件以来,在转介区域内进行的调查仅关注 BESS 和太阳能组件。
无人机 (UAV):使用控制、研究价值和操作...
开箱即用的可飞行无人机实际上在过去十年才开始出现,用于娱乐和研究 - 这是一个不断发展的问题。随着价格低于 500 英镑的消费产品的出现,它们的可用性和价格点在过去 5 年左右加速了普及,例如来自 DJI 的产品,它们易于飞行,可以使用运动相机飞行。大多数无人机都是四轴飞行器,开箱即可飞行 - 任何人都可以使用。大多数用于娱乐而非商业用途。可能用作交付平台,例如亚马逊,但超视距 (BVLOS)、物体避让、隐私等是一个问题。2017 年英国可能有 350 万架无人机。25% 的新娱乐用户不知道如何、在何处、何时飞行它们的任何控制。制定更严格的控制,例如无人机法案、CAP1627,但这些主要旨在降低对人类的风险,例如与飞机相撞。

双被动反应脑机接口
本研究提出了一种新的神经自适应技术概念,即双被动-反应脑机接口 (BCI),可实现人与机器之间的双向交互。我们在逼真的飞行模拟器中实现了这样一个系统,使用 NextMind 分类算法和框架来解码飞行员的意图(反应性 BCI)并推断他们的注意力水平(被动 BCI)。12 名飞行员使用反应性 BCI 执行检查单以及由被动 BCI 监督的防撞雷达监控任务。当后者检测到飞行员没有遇到即将到来的碰撞时,它会模拟自动避让动作。当仅执行检查单任务时,反应性 BCI 的分类准确率达到 100%,平均反应时间为 1.6 秒。当飞行员还必须驾驶飞机并监控防撞雷达时,准确率高达 98.5%,平均反应时间为 2.5 秒。被动 BCI 的 F 1 − 得分为 0.94。首次演示展示了双 BCI 改善人机协作的潜力,可应用于各种应用。

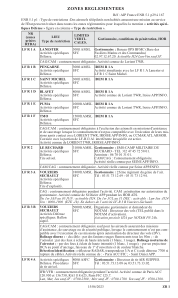
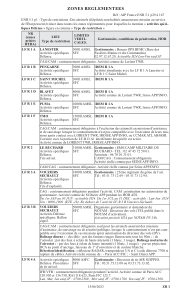
AD 2 - EGQL - 1 - 1 英国 MIL AIP LEUCHARS
5.除非操作需要,否则禁止使用再加热 2100-0630(S)+1(W)。当地区域噪音消减程序和监管避让适用如下(参见 C1)a. 应避开 Dundee 和 St Andrews 2000 英尺/0·5 海里。b. 收到 ATC 通知后,应避开 Balmullo Quarry(N56 22.52 W002 56.37)3000 英尺/0·5 海里。c. 应避开 Kinshaldy Stables(N56 24.13 W002 49.87)和 Edenside Stables(N56 21.35 W002 52.35)2000 英尺/0·25 海里。轻型飞机应尽最大努力避免在 2000 英尺以下直接飞越。d. 应尽最大努力避免在以下所有当地城镇和村庄(噪音敏感地点)2000 英尺以下直接飞越。e. 收到 ATC 通知后,不应在 2000 英尺以下飞越圣安德鲁斯林克斯。在其他所有时间,应尽最大努力避免在 2000 英尺以下直接飞越。